
Computer Graphics for Virtual
and Augmented Reality
Lecture 02 – Introduction to
Virtual Reality
Edirlei Soares de Lima
<edirlei.lima@universidadeeuropeia.pt>
What is Virtual Reality?
•
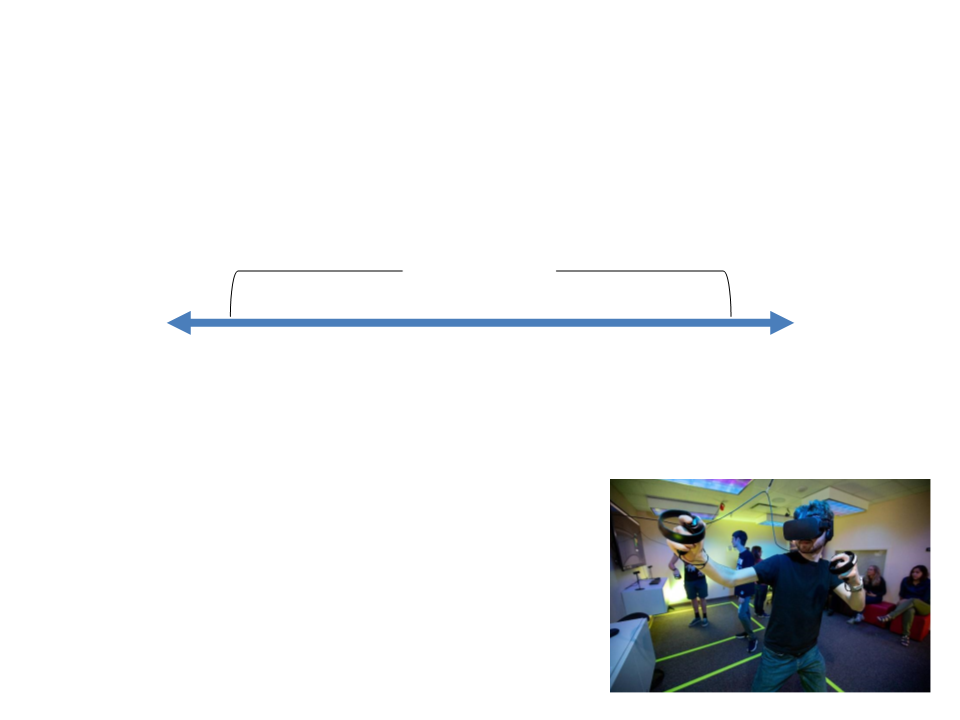
From Reality to Virtual Reality:
Mixed Reality
Real
World
Augmented
Reality (AR)
Virtual
Reality (VR)
Virtual
World
–
In virtual reality, users are immersed in a
computer-generated environment.
Virtual Reality
•
Main characteristics:
–
Immersion: user feels immersed in the computer-generated
environment
•
Immersion and presence: while immersion describes the extent to which
technology can deliver a vivid illusion of reality, presence represents the state of
consciousness and sense of being in the virtual environment
–
–
Interaction: user can interact with virtual content
Independence: user can have an independent view and react to the
environment
•
Goal of VR: create a high degree of presence
–
Make users believe they are in the virtual environment.
Immersion
•
Produced by:
–
–
–
–
Quality of graphics/sound
Enveloping environment
Natural interaction
Realism

Presence
•
Presence is the subjective experience of being in one place or
environment even when physically situated in another.
–
Mental immersion – suspension of disbelief
–
Physical immersion – bodily entering the medium
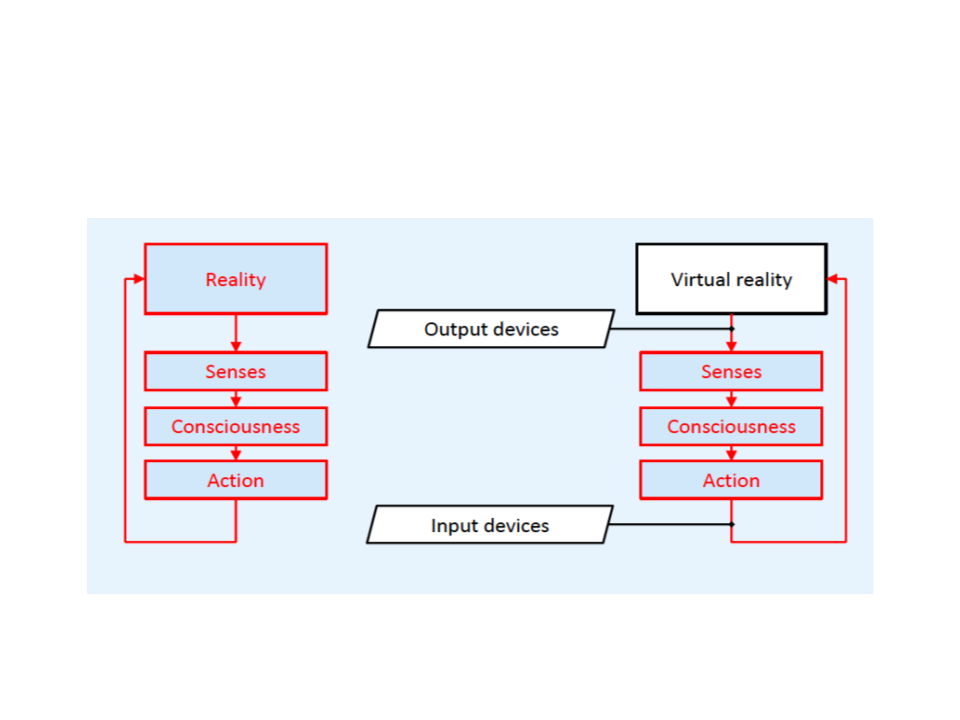
Reality vs. Virtual Reality
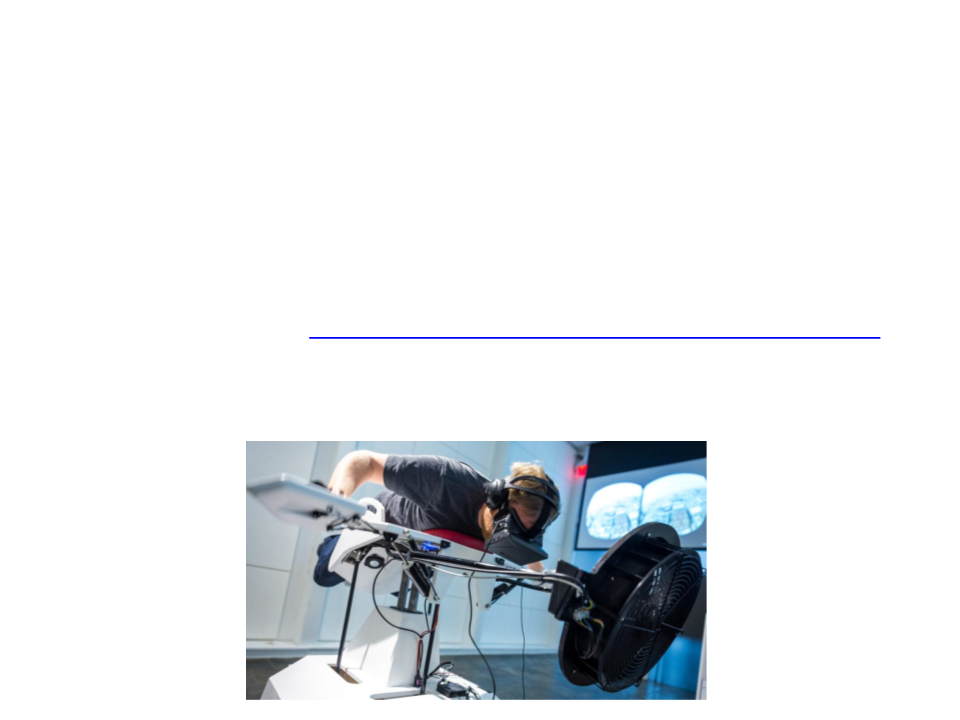
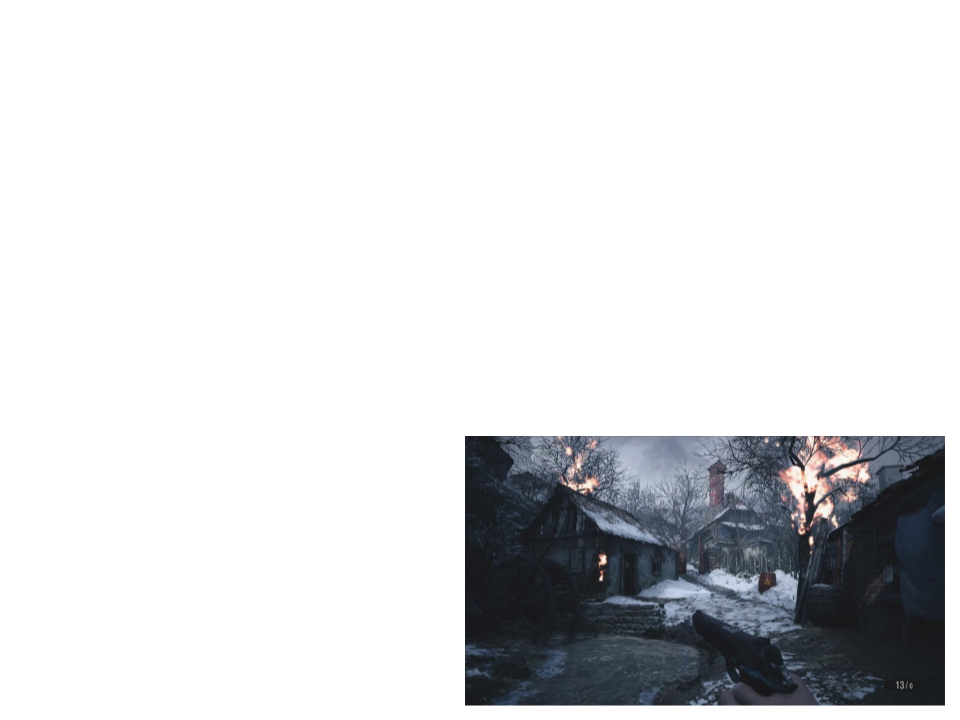
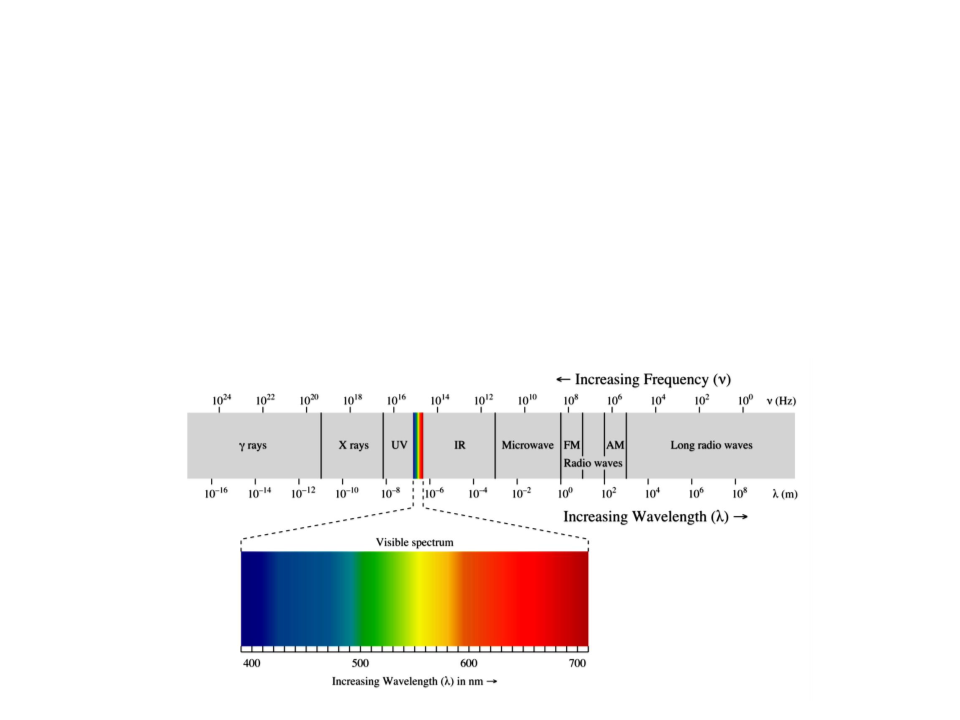
Creating the Illusion of Reality
•
•
Fooling human perception by using technology to generate
artificial sensations.
Example: Birdly (https://www.youtube.com/watch?v=gHE6H62GHoM)
–
Create illusion of flying like a bird
–
Multisensory VR experience (visual, audio, wind, haptic)
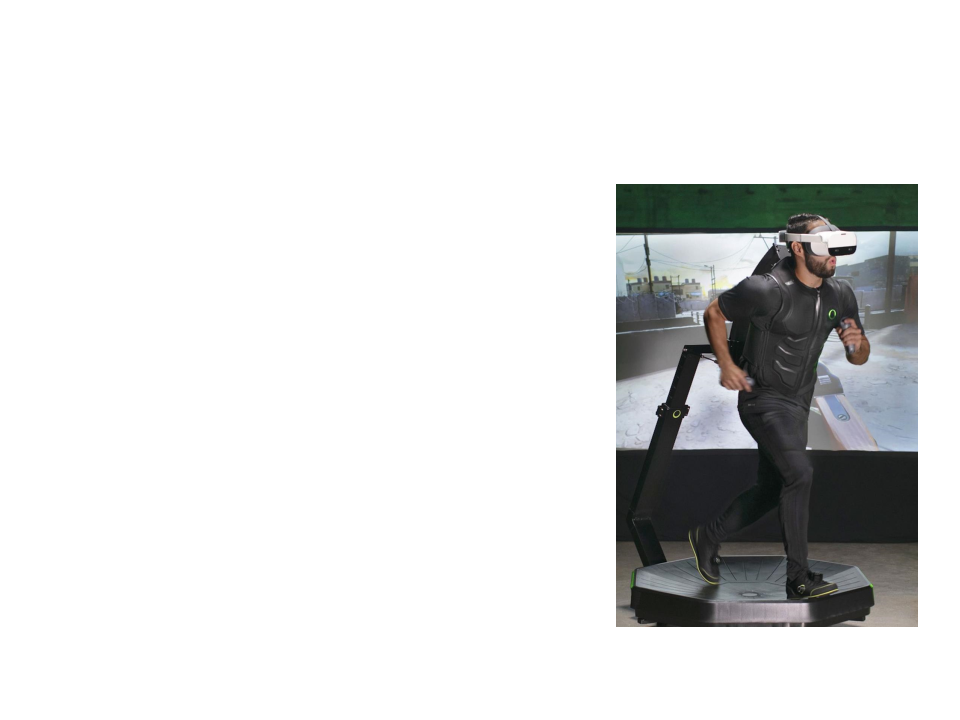
Technologies for VR Systems
•
•
Display (Immersion)
–
Simulates senses (visual, auditory, tactile)
Tracking (Independence)
–
Allow users to change viewpoint
–
Independent movement
•
Input Devices (Interaction)
–
Supports user interaction
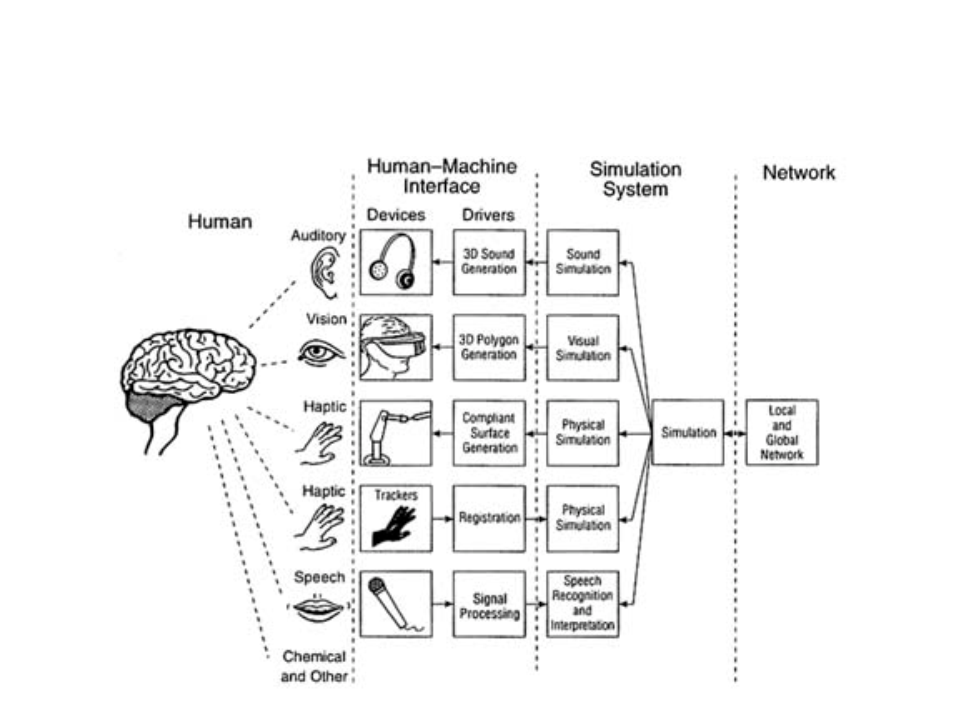
Using Technology to Stimulate Senses

Head-Mounted Display (HMD)
Head-Mounted Display (HMD)

Key Properties of HMDs
•
•
Lens
–
Focal length, Field of View
–
Occularity, Interpupillary distance
Display
–
–
–
Resolution, Contrast
Power consumption, brightness
Refresh rate
•
Ergonomics
–
Size, Weight, Wearability
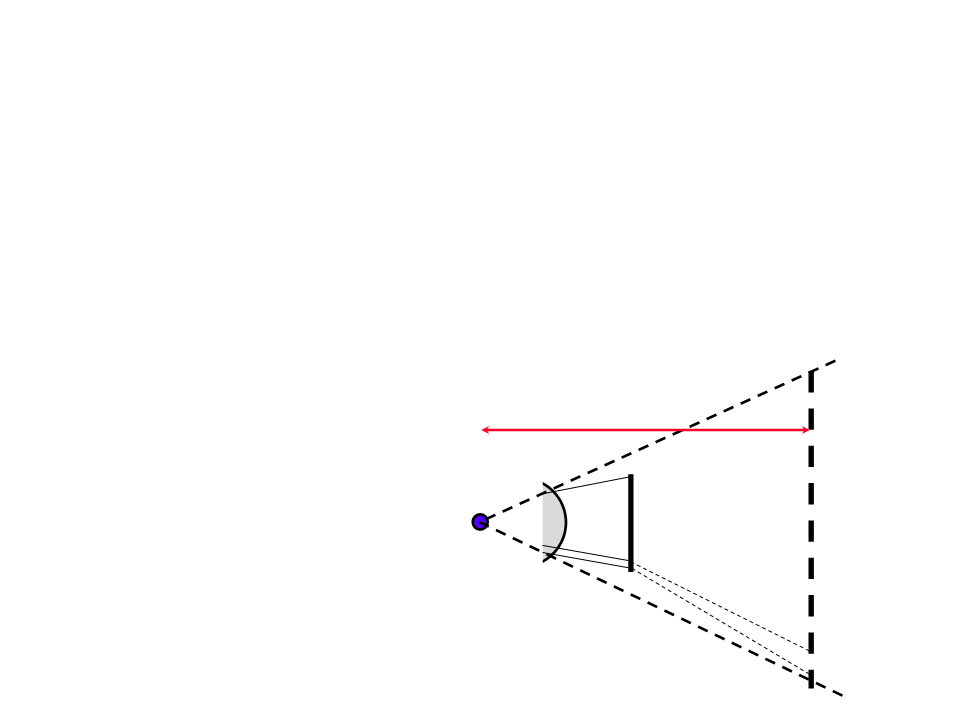
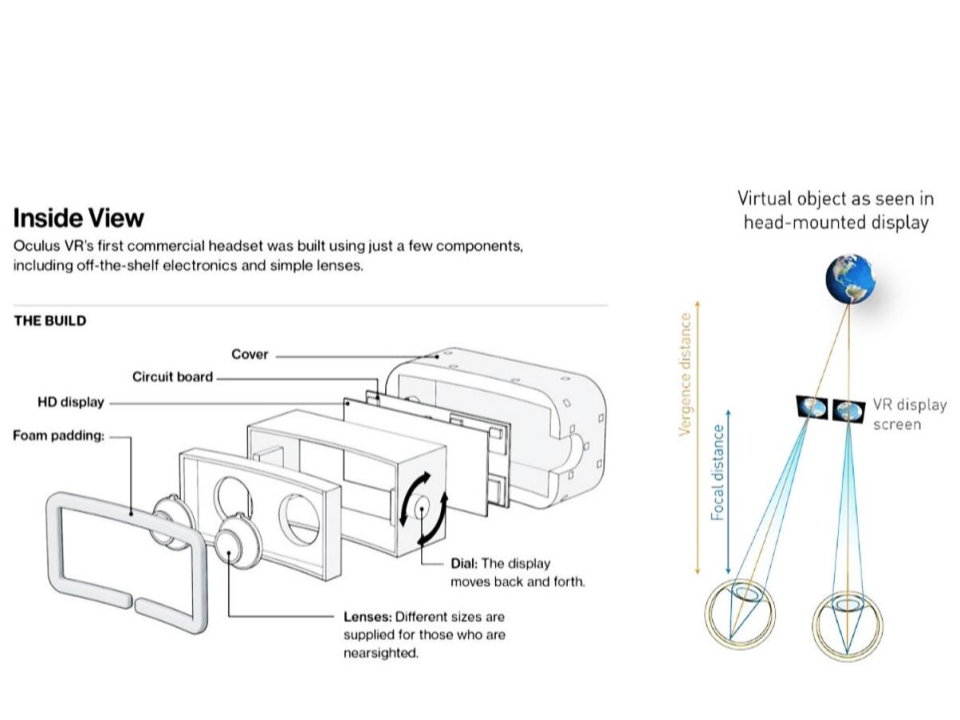
Focal Distance
•
The lenses make possible to focus on the images produced by
the display that is very close to a user’s eyes.
–
The lenses are placed between the screens and the viewer’s eyes,
giving the illusion that the images are out to a distance where they can
be viewed comfortably.
focus distance
virtual image
screen
eye
optics
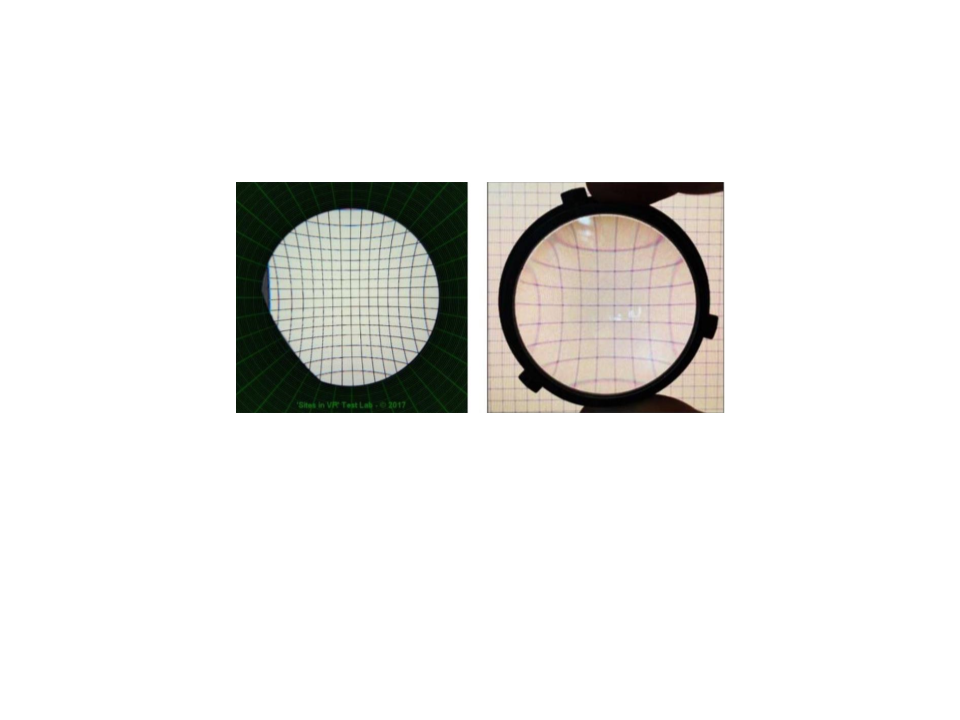
Distortion in Lens Optics
•
To Correct distortions:
–
Must pre-distort the image
–
Pixel-based distortion using shader programming

Distortion in Lens Optics
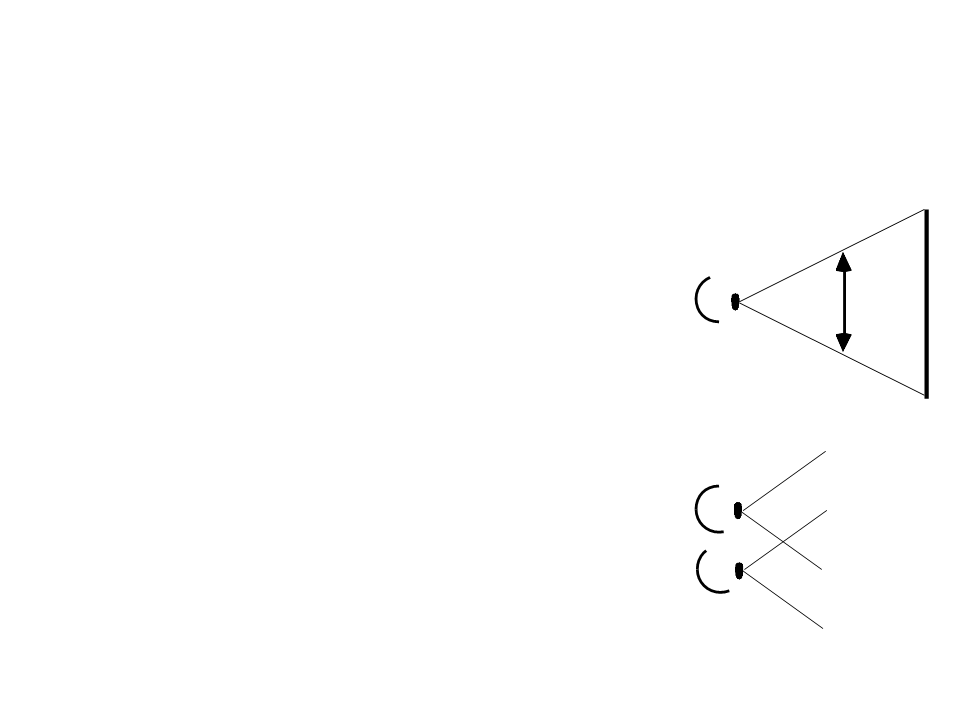
Field of View
•
•
Monocular FOV:
–
The angular size of the displayed image as
measured from the pupil of one eye.
Total FOV/Stereoscopic FOV:
–
total angular size of the displayed image visible
to both eyes.
•
FOV may be measured horizontally,
vertically or diagonally.

Oculus Rift
•
•
•
•
•
FOV: 110º Horizontal
Refresh rate: 90 Hz
Resolution: 1080x1200/eye
3-DOF orientation tracking
3-axis positional tracking
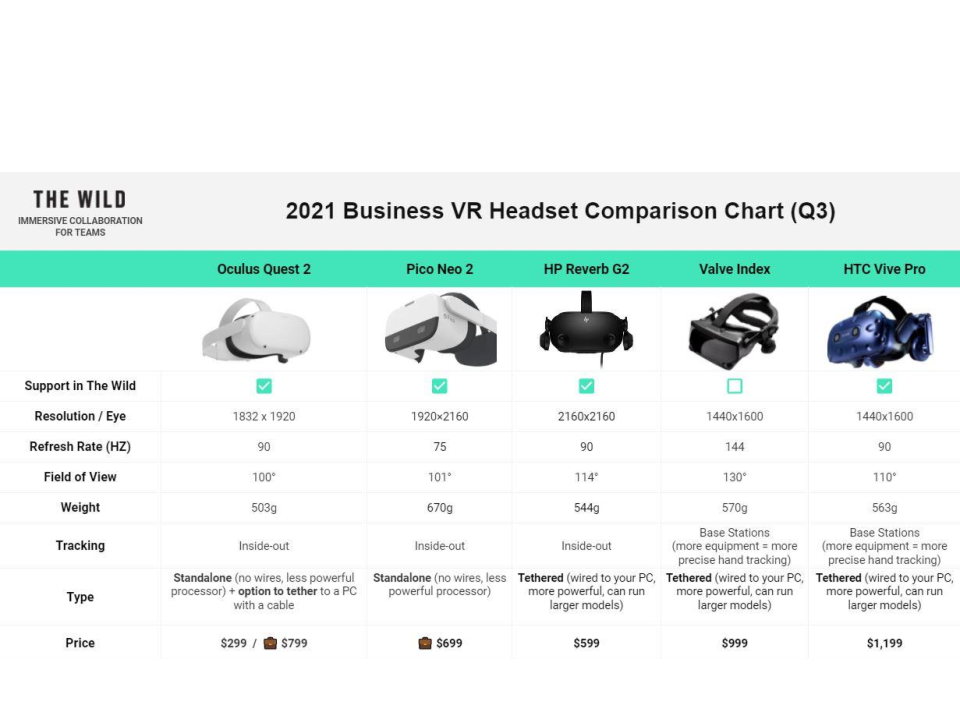
Comparison Between HMDs
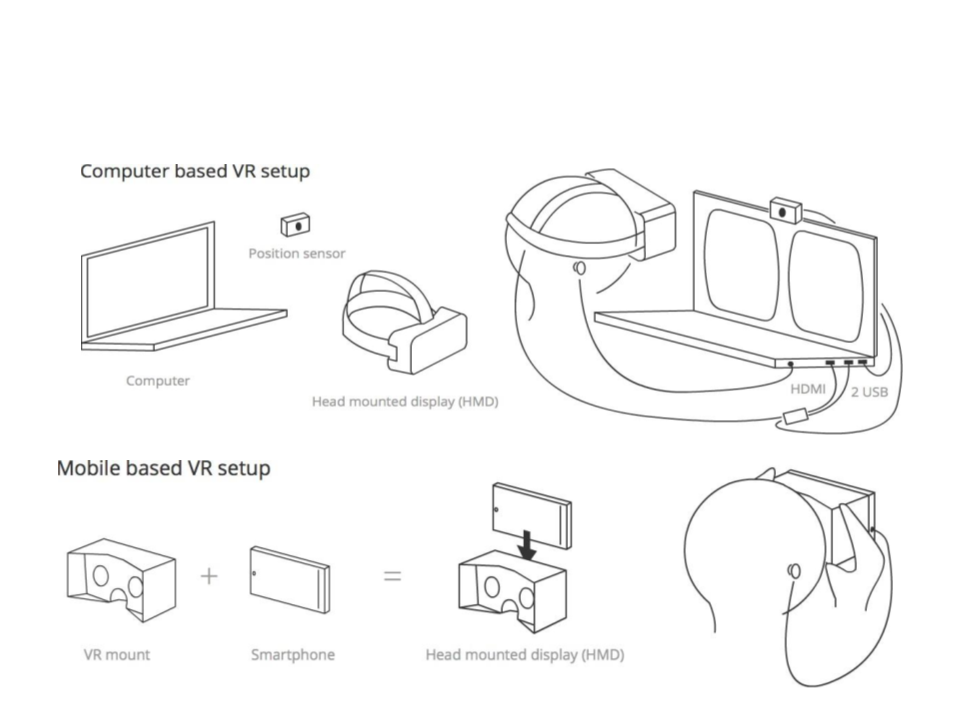
Computer Based vs. Mobile VR Displays
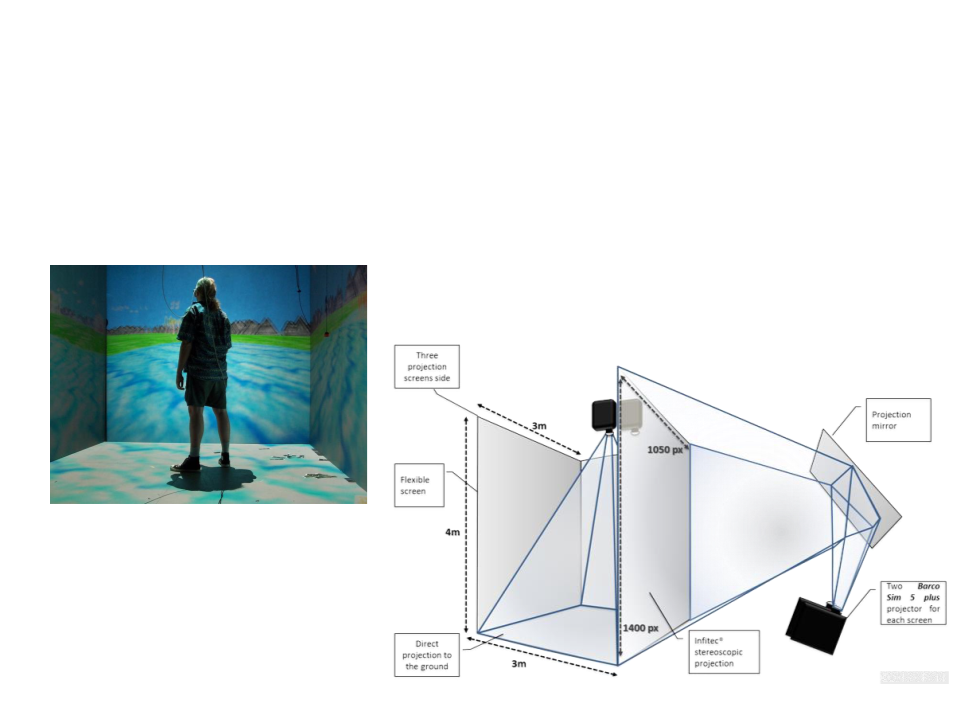
Projection/Large Display Technologies
•
CAVE Systems:

Projection/Large Display Technologies
•
CAVE Systems:

Vehicle Simulators
•
Combine VR displays with vehicles
–
–
–
Visual displays on windows
Motion base for haptic feedback
Audio feedback
•
•
Physical vehicle controls
– Steering wheel, flight stick, etc
Full vehicle simulation
–
–
–
Emergencies, normal operation, etc
Weapon operation
Training scenarios
Tracking Technology
•
For immersion, when the user changes position in the real
world, the VR view also needs to change.
–
Requires tracking of the user’s pose (position and orientation) in the
real world.
Tracking in VR
•
•
Common tracking elements:
–
–
–
–
Head position and orientation
Body position and orientation
Hands position and orientation
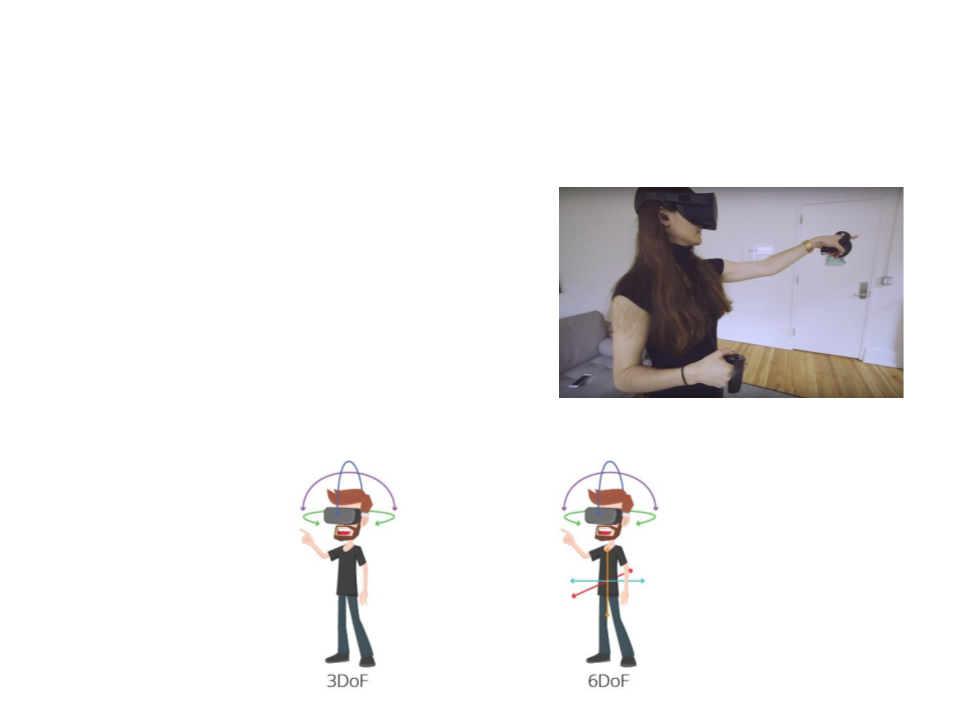
Fingers, legs, torso, eyes, etc.
Degrees of Freedom:

Main Tracking Methods
•
•
•
Camera-based:
–
Cameras + image processing algorithms
Mechanical:
–
Armature with joints + angle measurements
Inertial:
–
Gyroscopes + accelerometers
•
Electromagnetic:
–
Magnetic field generators + magnetic field detectors
Camera-Based Tracking Methods
•
Fast and high-resolution cameras
–
Number of cameras depends can affect the precision
•
Typically, two or more for VR
–
Normal camera or infrared cameras
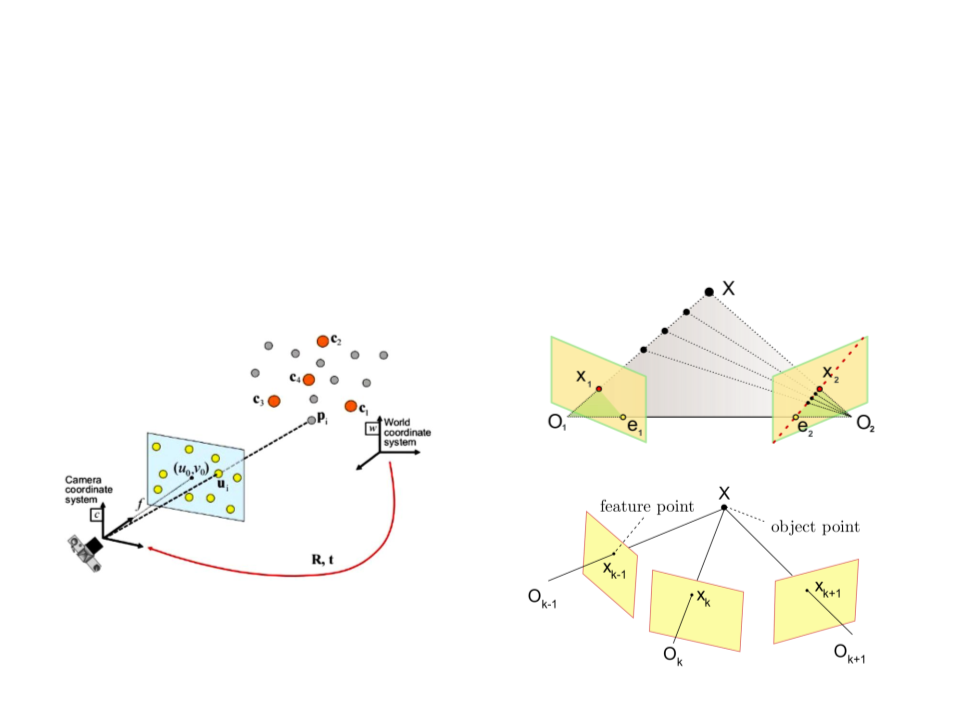
Camera-Based Tracking Methods
•
Projective Geometry Techniques
–
Single camera vs. multiple cameras
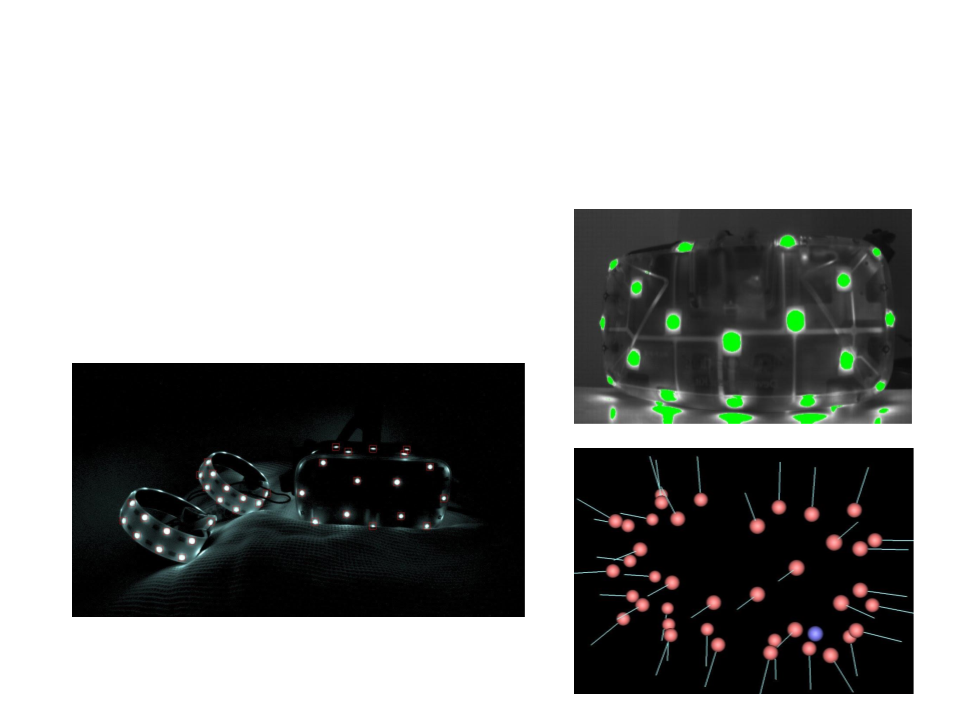
Camera-Based Tracking Methods
•
Point Tracking Techniques:
–
–
–
Infrared light and infrared cameras
Reflector balls
Single or multiple cameras
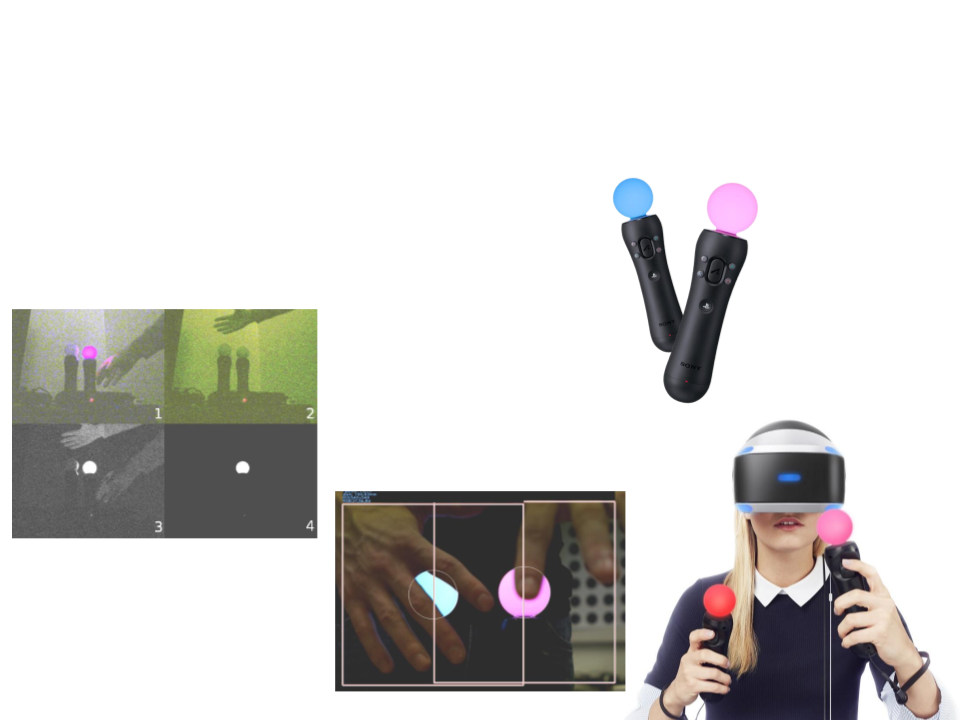
Camera-Based Tracking Methods
•
Sphere Tracking Techniques:
–
2D position translates to line in 3D
–
Sphere size translates to distance
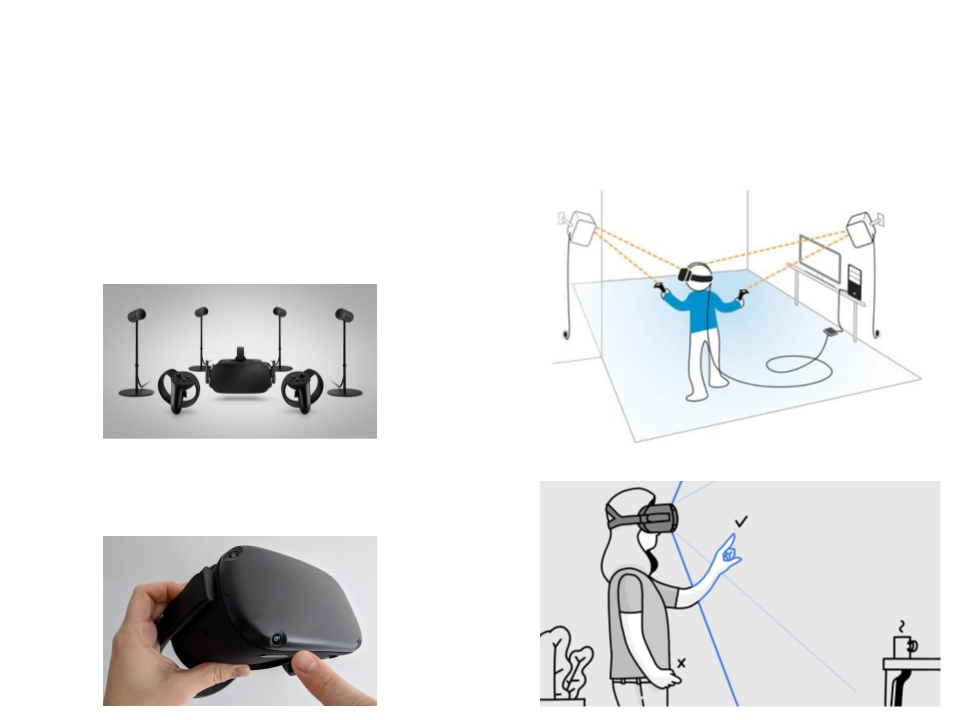
Camera-Based Tracking Methods
•
•
Outside-in Tracking
–
Stationary cameras and moving
markers
Inside-out tracking
–
Camera on/in the device

Performance Criteria for Tracking Methods
•
Static Accuracy:
–
Ability of the tracking method to determine the coordinates of a
position in space when the sensors and tracked objects are not
moving.
–
Depends on sensor sensibility, algorithms, and environment.
•
Dynamic Accuracy:
–
Ability of the tracking method to determine the coordinates of a
position in space as the sensors and tracked objects move.
–
Depends on static accuracy, movement, and occlusions.
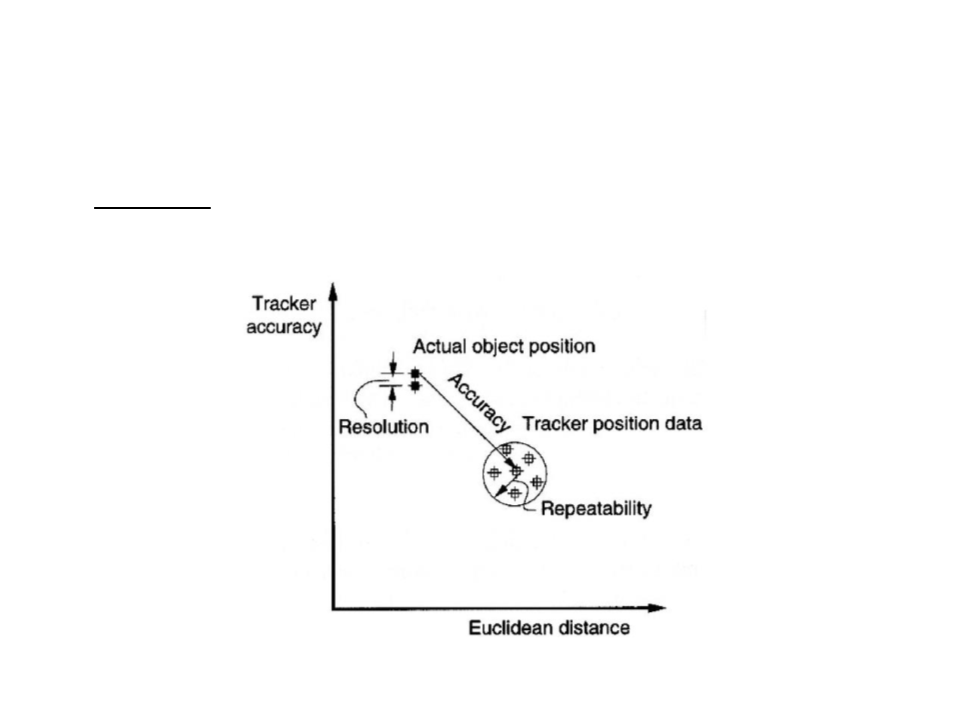
Performance Criteria for Tracking Methods
•
Accuracy: difference between actual position and measured
position
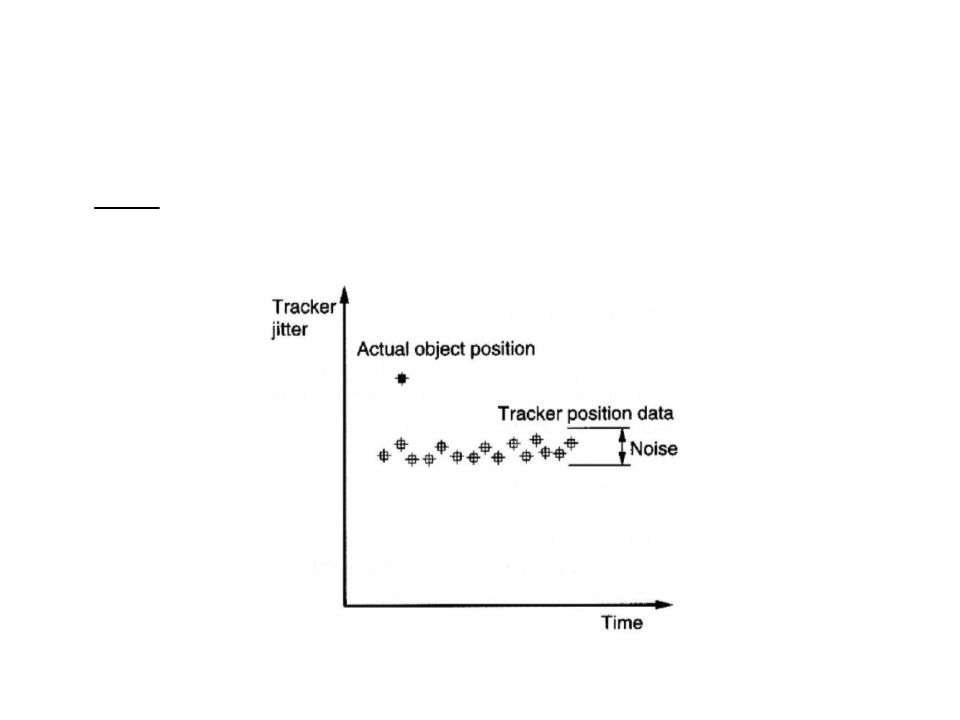
Performance Criteria for Tracking Methods
•
Jitter: changes in tracker output when stationary (sensor
noise)
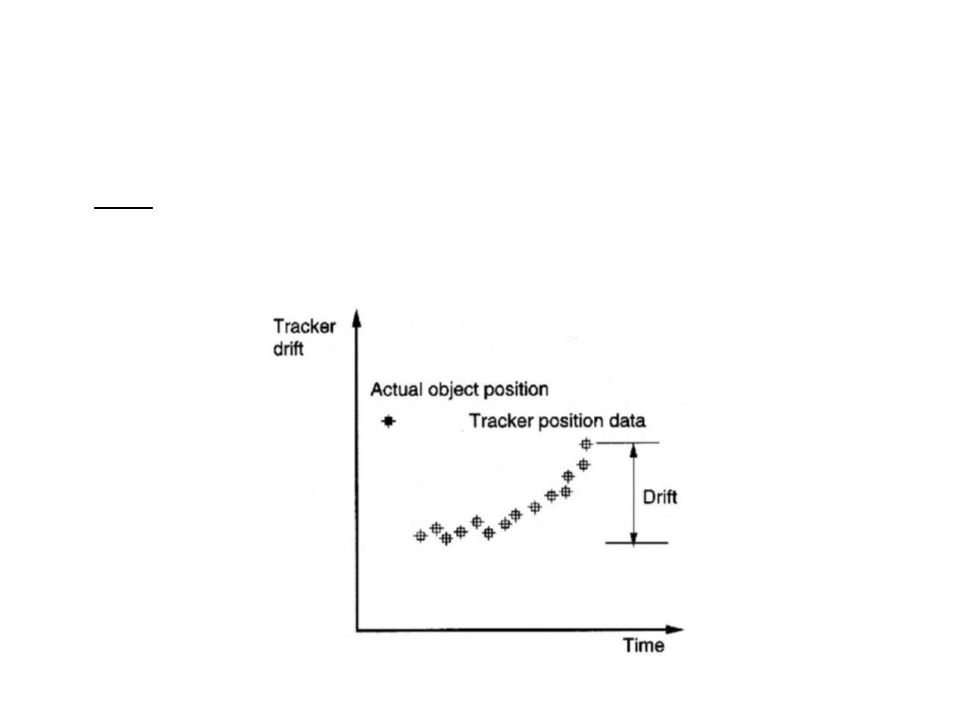
Performance Criteria for Tracking Methods
•
Drift: steady increase in tracker error over time (accumulative
error)
–
Can be controlled by periodic recalibrations.
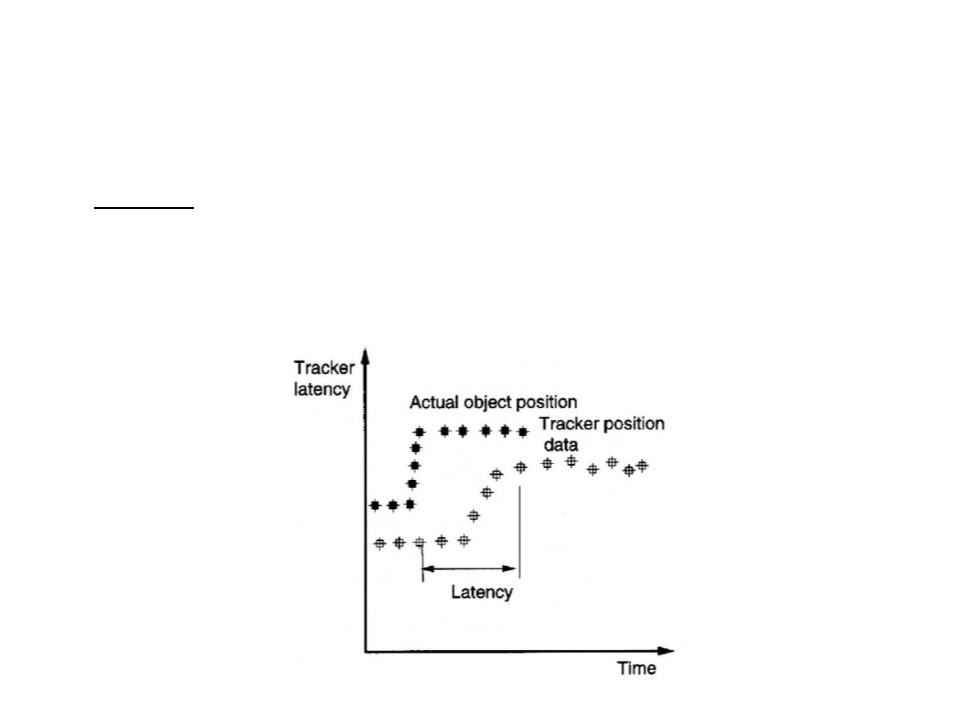
Performance Criteria for Tracking Methods
•
Latency: time between a change in the object position and
the time the sensors detect the change.
–
Large latency (> 10 ms) can cause simulation sickness.
–
Larger latency (> 50 ms) can break VR immersion.
Further Reading
•
Sherman, W. R., Craigm A. B. (2003). Understanding Virtual Reality:
Interface, Application, and Design (1st ed.). Morgan Kaufmann. ISBN: 978-
1
558603530.
–
Chapter 1: Introduction to Virtual Reality
Chapter 2: VR The Medium
Chapter 3: Interface to the Virtual World – Input
Chapter 4: Interface to the Virtual World – Output
–
–
–