INF1771 - INTELIGÊNCIA ARTIFICIAL
TRABALHO 2 – LÓGICA
Descrição:
Após reunir a equipe de programadores para participar do 1° Concurso Mundial de
“
Desenvolvimento de Softwares, Barbie e seus amigos iniciaram o desenvolvimento de
um software revolucionário: A simulação ultra-realista do Incrível Mundo da Barbie!
Após passarem várias madrugadas programando incansavelmente, Barbie e seus
amigos finalmente concluíram a versão beta do seu software. Porém, a simulação ainda
está repleta de bugs.
O principal bug que está afetando a simulação do Incrível Mundo da Barbie é um
denso nevoeiro que impossibilita que os usuários possam ver o que está acontecendo
ao seu redor.
Além disso, outros bugs estão gerando perigos ocultos na simulação, como perigosos
buracos nos quais cairá qualquer um que tentar passar sobre eles, perigosos vórtices
espaciais que teletransportam quem se aproximar deles para qualquer outro ponto da
simulação, além de perigosas baratas espalhadas pela simulação.
Para conseguir corrigir esses bugs, Barbie terá que entrar na simulação e localizar
todos os bugs existentes. O seu objetivo é ajudar a Barbie a explorar a perigosa
simulação beta do Incrível Mundo da Barbie e corrigir todos os bugs!”
Figura 2. Bug do Incrível Mundo da Barbie.
Figura 1. Barbie Programadora.
O Trabalho 2 consiste em implementar um agente baseado em conhecimento capaz de
raciocinar de forma inteligente nesse ambiente desconhecido. Você deve implementar
uma interface para representar visualmente esse ambiente e utilizar a linguagem Prolog
para representar o conhecimento do agente.
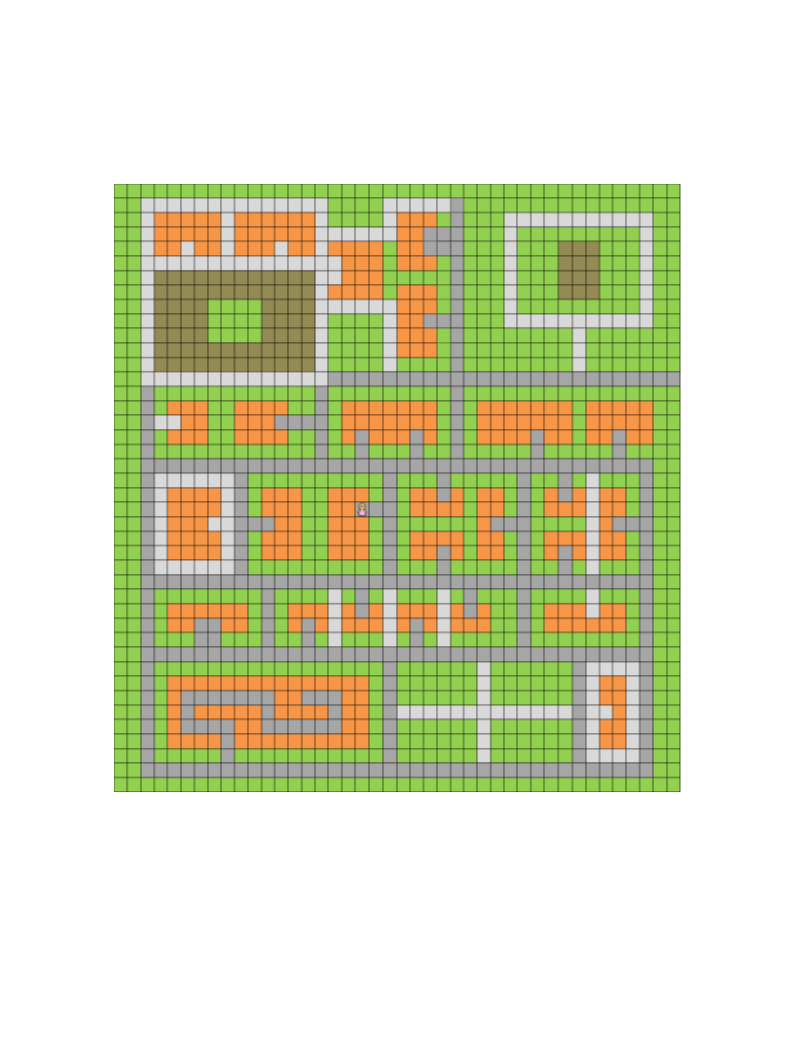
O mapa da simulação do Incrível Mundo da Barbie é mostrado na Figura 3.
Figura 3. Mapa do Incrível Mundo da Barbie.
A simulação do Incrível Mundo da Barbie é formado por 5 tipos de terrenos: asfalto
(
(
região cinza escuro), grama (região verde), terra (região marrom), paralelepípedo
região cinza claro) e edifícios (região laranja). O agente pode passar livremente por
todos os tipos de terrenos, exceto regiões de edifícios (região laranja).
Inicialmente o agente não conhece nada sobre a simulação do Incrível Mundo da
Barbie, ele deve explorar o ambiente e utilizar seus sensores para obter informações.
Informações Adicionais:
•
O mapa deve ser representado por uma matriz 42 x 42 (igual à mostrada na
Figura 3).
•
Na simulação do Incrível Mundo da Barbie existem os seguintes elementos:
o Buracos – se o agente cair em um buraco ele morre imediatamente;
o Baratas – o agente morre imediatamente se ele entrar em um local onde
existe uma barata;
o Vórtices Espaciais – ao entrar em um vórtice espacial o agente é
teletransportado para algum outro local aleatório da simulação;
o Kits de Maquiagem – até mesmo na simulação é importante manter o
glamour! Encontrar um kit de maquiagem da pontos extras ao agente;
o Bugs – bugs que estão causando os problemas na simulação. O agente
deve encontrar todos os bugs para concluir a sua jornada;
•
•
O agente sempre inicia a jornada na Casa da Barbie (posição [19, 23] no
mapa). A aventura termina quando o agente conseguir encontrar e corrigir todos
os bugs da simulação.
O agente pode executar as seguintes ações:
o Mover para Frente;
o Virar a Direita (rotação de 90°);
o Virar a Esquerda (rotação de 90°);
o Atacar – Para jogar o salto-alto na direção em que o personagem estiver
olhando (matando as baratas que estiverem no local adjacente);
o Pegar Kit de Maquiagem – Para pegar o kit de maquiagem existente do
local onde o agente estiver. A ação somente pode ser executada uma vez
em cada local que exista um kit de maquiagem;
o Corrigir Bug – Para corrigir um bug existente na simulação. A ação
somente pode ser executada em locais que existam bugs;
•
Cada ação executada pelo agente possui um custo:
o Mover para Frente = -1;
o Virar a Direita = -1;
o Virar a Esquerda = -1;
o Atacar = -10;
o Pegar Kit de Maquiagem = +10;
o Corrigir Bug = +100;
o Cair em um Buraco = -10000;
o Ser atacado por uma Barata = -10000;
•
O agente não tem acesso a nenhuma informação do mapa, mas ele possui alguns
sensores para perceber o ambiente. O agente possui os seguintes sensores:
o Em locais adjacentes a buracos, exceto diagonal, o agente sente uma leve
brisa;
o Em locais adjacentes a baratas, exceto diagonal, o agente ouve as baratas
andando;
o Em locais adjacentes a vórtices espaciais, exceto diagonal, o agente
percebe distorções espaciais;
o Em locais onde existe um bug, o agente percebe códigos binários voando
ao seu redor;
o Em locais onde existe um kit de maquiagem, o agente sente o seu
glamour aumentando;
•
O mapa tem a estrutura ilustrada na Figura 3. O agente tem acesso à estrutura do
mapa, mas é desconhecida a localização dos buracos, baratas, bugs, vórtices
espaciais e kits de maquiagem. Sabe-se apenas que existem:
o 100 Baratas;
o 50 Buracos;
o 30 Kits de Maquiagem;
o 20 Vórtices Espaciais;
o 20 Bugs;
•
•
As posições dos buracos, baratas, bugs, vórtices espaciais e kits de maquiagem
devem ser sorteadas aleatoriamente no inicio do programa. Mas o agente NÃO
PODE ter acesso direto a essas informações.
Os elementos (buracos, baratas, bugs, vórtices espaciais e kits de maquiagem)
não podem estar em regiões de prédios. Além disso, não pode existir mais de um
elemento na mesma posição. Durante a geração aleatória da posição dos
elementos, o seu programa deve garantir que essas regras sejam respeitadas.
•
•
Ao entrar em um vórtice espacial o agente é teletransportado para uma nova
posição no mapa. Essa posição deve ser um local com terreno diferente de
edificios sorteado aleatoriamente. Podendo ser um local onde existem buracos,
baratas ou qualquer outro elemento, inclusive um novo vórtice espacial.
Enquanto o agente corrige os bugs, gradativamente a simulação volta a
funcionar corretamente. Após a correção de um determinado número de bugs,
as seguintes alterações ocorrem na simulação:
o 10 bugs corrigidos: os vórtices espaciais desaparecem da simulação;
o 14 bugs corrigidos: as baratas desaparecem da simulação;
o 18 bugs corrigidos: os buracos desaparecem da simulação;
o 20 bugs corrigidos: o nevoeiro desaparece;
•
O jogo acaba quando o agente conseguir corrigir todos os bugs existentes na
simulação, ou quando o agente morrer ao cair em um buraco ou ao ser atacado
por uma barata. O jogo deve acabar imediatamente quando o agente corrigir os
2
0 bugs.
Requisitos:
•
O programa deve ser implementado em C/C++ ou Java utilizando a biblioteca
do SWI-Prolog que permite acessar diretamente o Prolog. Também é permitido
utilizar outras linguagens, mas antes você deve verificar se ela é compatível com
o SWI-Prolog. Exemplos:
o C# (http://www.swi-prolog.org/contrib/CSharp.html)
o Python (http://code.google.com/p/pyswip/)
o PHP (http://www.j-paine.org/dobbs/prolog_from_php.html)
•
•
•
•
O Prolog deve ser utilizado somente para representar o conhecimento do
agente, a interface visual e demais controles devem ser implementados em
C/C++ ou Java.
Não é permitido realizar nenhum processo de tomada de decisão em C/C++
ou Java, a decisão de quais ações o agente vai realizar deve ser feita
exclusivamente pelo Prolog.
Deve existir uma maneira de visualizar os movimentos do agente, mesmo que a
interface seja bem simples. Podendo até mesmo ser uma matriz desenhada e
atualizada no console.
O mapa do Incrível Mundo da Barbie deve ser configurável, ou seja, deve
ser possível modificar o tipo de terreno em cada local. O mapa pode ser lido de
um arquivo de texto ou deve ser facilmente editável no código.
•
•
O programa deve exibir um log das consultas e inserções realizadas na base de
conhecimento Prolog.
O programa também deve exibir a pontuação do agente enquanto ele executa
as ações. Assim como a pontuação final.
•
•
O trabalho pode ser feito individualmente ou em grupos de no máximo 3
pessoas.
O programa deve ser apresentado durante a aula por todos os membros do
grupo:
o O membro do grupo que não comparecer receberá nota zero;
o O membro do grupo que não souber explicar algo relacionado ao
trabalho perderá 5.0 pontos.
Dicas:
•
Planeje e defina exatamente quais vão ser os predicados necessários no Prolog
para codificar o conhecimento que o agente tem do mundo. Exemplos:
o em(3, 3).
- define a posição atual do agente;
o buraco(10, 6).
- identifica que existe um buraco na posição (10, 6);
o maquiagem(10, 13). - identifica que existe um kit de maquiagem na
posição (10, 13);
•
•
Lembre-se de codificar predicados para identificar locais seguros e também
locais visitados.
A maneira mais simples de codificar a comunicação entre o Prolog e o C/C++
ou Java é definindo um predicado “melhorAção” no Prolog. Esse predicado deve
retornar a melhor ação para ser executada naquele momento. Comece
codificando os comportamentos mais simples, como por exemplo:
o melhorAcao(pegar_maquiagem(X,Y)) :- em(X,Y), maquiagem(X, Y).
•
A ação “andar” não necessariamente precisa ser para um local adjacente a
posição do agente. Pode ser um “andar” para outro local (X, Y) ainda não
visitado. Nesse caso, você pode executar o A* para calcular o melhor caminho
para chegar até a posição (X, Y) passando por locais seguros, mas lembre-se de
tomar cuidado com os elementos existentes no mapa e também de aplicar os
custos de movimentação.
Forma de Avaliação:
Será avaliado se:
(
(
(
(
1) O trabalho atendeu a todos os requisitos especificados anteriormente;
2) Os algoritmos foram implementados e aplicados de forma correta;
3) O código foi devidamente organizado;
4) O trabalho foi apresentado corretamente em sala de aula;
Bônus:
1) O agente que conseguir corrigir todos os bugs com o menor custo, dado uma
(
determinada configuração de elementos (buracos, baratas, bugs, vórtices
espaciais e kits de maquiagem), receberá 2 pontos extras na nota. Para participar
dessa competição é necessário que o programa inclua uma forma simples de
definir manualmente a posição dos buracos, baratas, bugs, vórtices espaciais e
kits de maquiagem. Em caso de empate, ambos os trabalhos receberão a nota
extra.
Data de Entrega:
5/11
0
Forma de Entrega:
O programa deve ser apresentado na aula do dia 05/11 (quarta) e enviando até o mesmo
dia para o email edirlei.slima@gmail.com.
Trabalhos entregues atrasados perderam 0.5 pontos para cada dia de atraso.