INF 1771 – Inteligência Artificial
Aula 25 – Waypoints e Pathfinding
Edirlei Soares de Lima
<elima@inf.puc-rio.br>

Introdução
Locomover-se no espaço do jogo é uma ação
fundamental dos NPCs em qualquer gênero de jogo.
A busca de caminhos deve ser implementada de
maneira muito eficiente, pois será executada
muitas vezes por vários personagens durante o jogo
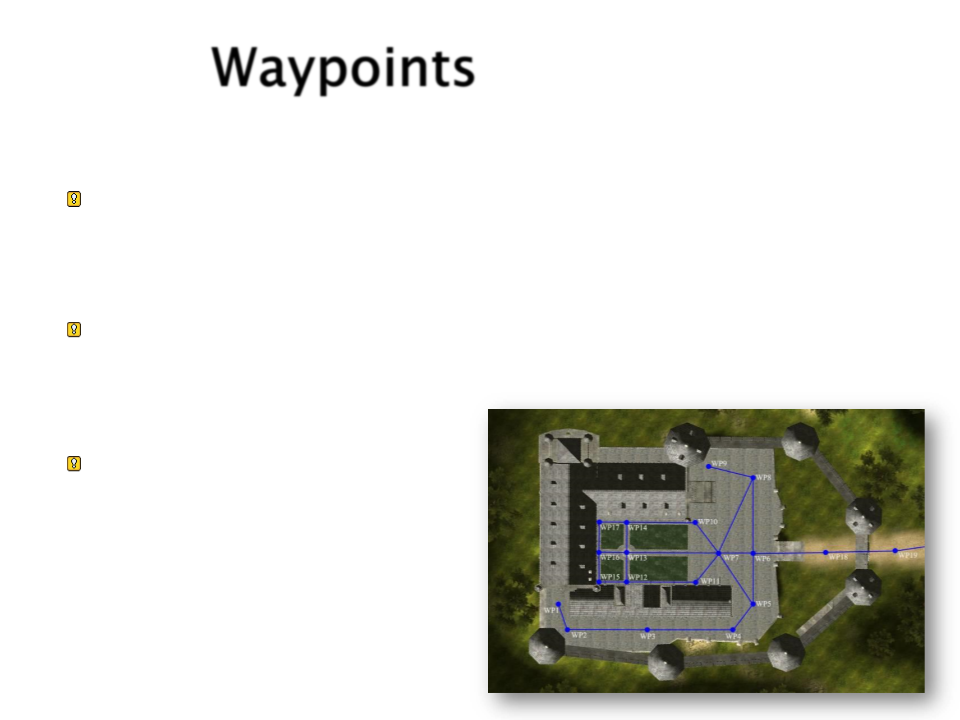
Waypoints
Waypoints são uma representação aproximada
do terreno (amostragem).
Fornecem representações mais econômicas
do que as malhas poligonais dos cenários.
Estrutura de grafos.
Construção de Grafos de Navegação
Um grafo de navegação é uma estrutura de grafo
formada por um conjunto de waypoints.
Existem várias formas de representar a geometria do
ambiente do jogo, da mesma forma existem várias
estratégias para converter a informação espacial
em uma estrutura de grafo:
Pontos de Visibilidade
Tiles (Grid)
Geometria Expandida
NavMesh
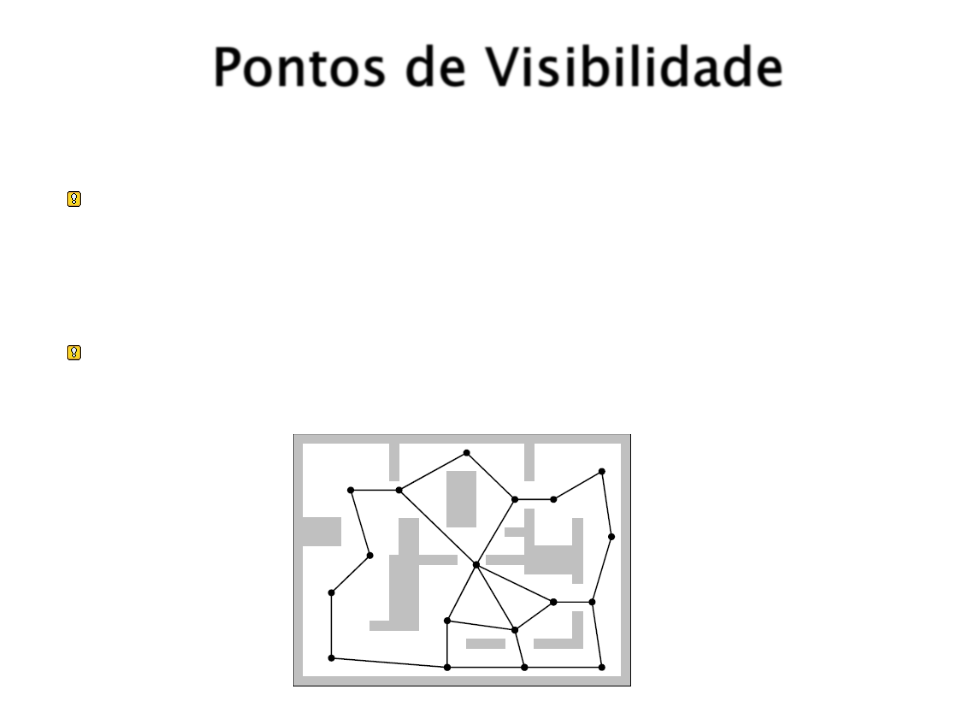
Pontos de Visibilidade
A criação de um grafo de navegação baseado em
Pontos de Visibilidade consiste na adição de
nós em pontos importantes do ambiente.
Os pontos do grafo devem ter pelo menos uma
linha reta de visão para algum outro ponto.
Pontos de Visibilidade
Geralmente o processo de adição dos pontos de
visibilidade é feito manualmente pelo game
designer.
Se o jogo restringe o movimento dos agentes
somente sobre as arestas do grafo, como ocorre no
Pac-man, esta solução é a escolha perfeita.
Entretanto, se o grafo é projetado para um jogo onde
os agentes têm maior liberdade de movimentos é
necessário realizar mais algumas tarefas.
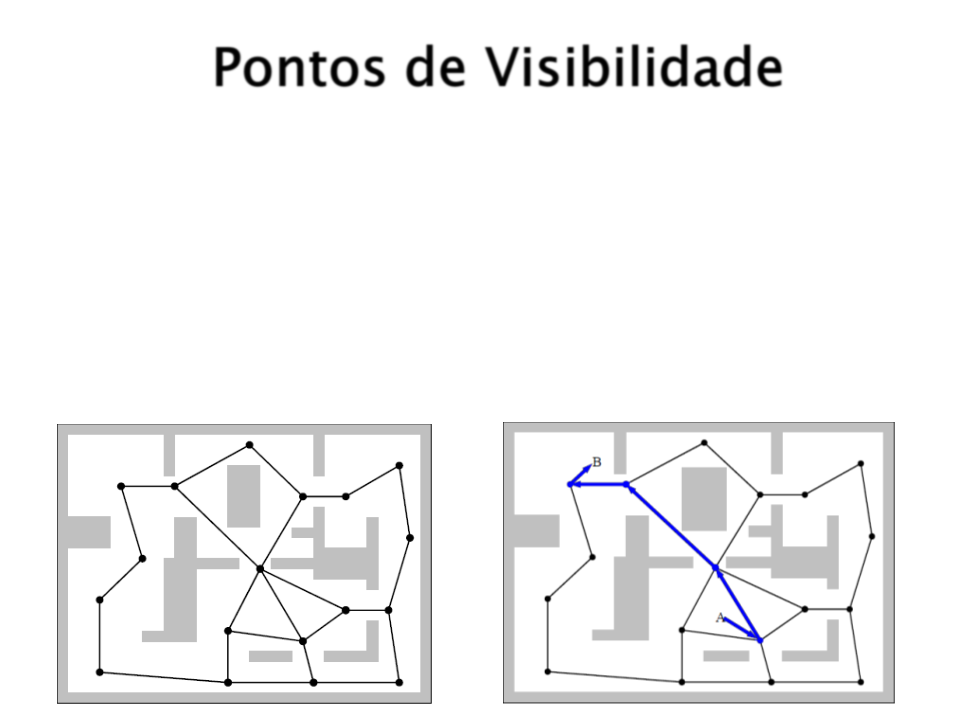
Pontos de Visibilidade
1
2
3
) Procura o nó visível A mais próximo da posição do NPC;
) Procura o nó visível B mais próximo da posição destino;
) Usa um algoritmo para encontrar o caminho de menor
custo entre A e B;
4
5
6
) Move o NPC para o nó A;
) Move o NPC sob o caminho calculado no passo 3;
) Move o NPC do nó B até a posição destino.
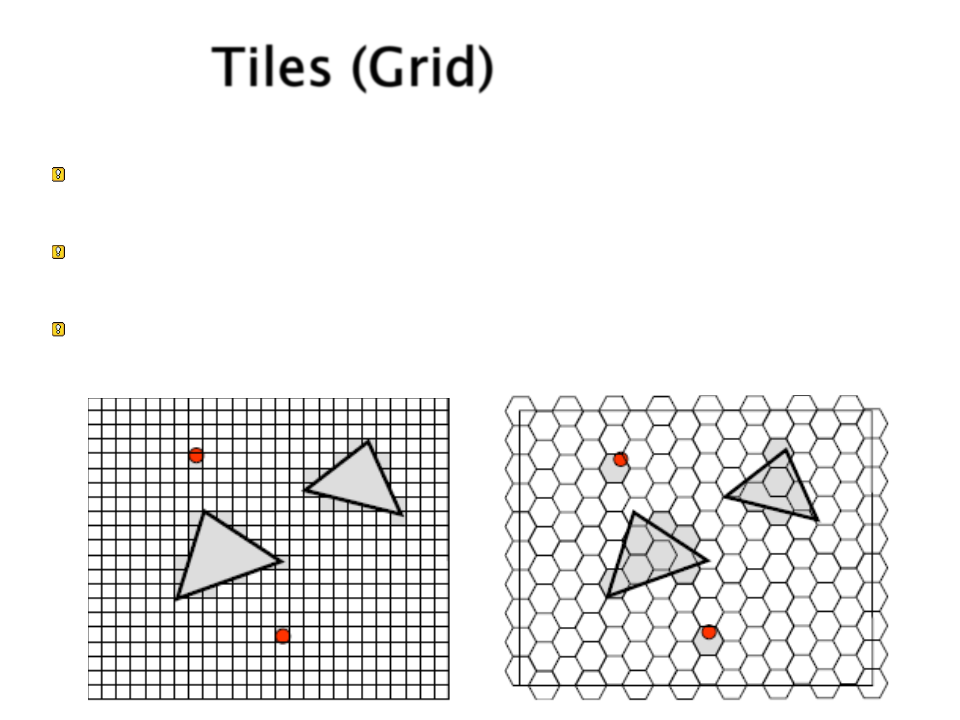
Tiles (Grid)
Este tipo de abordagem é muito comum em jogos de
estratégia em tempo real (RTS).
Geralmente são grafos grandes e complexos,
organizados por meio de quadrados ou hexágonos.
Cada nó do grafo representa o centro de cada célula e
as arestas representam a vizinhança de cada célula.
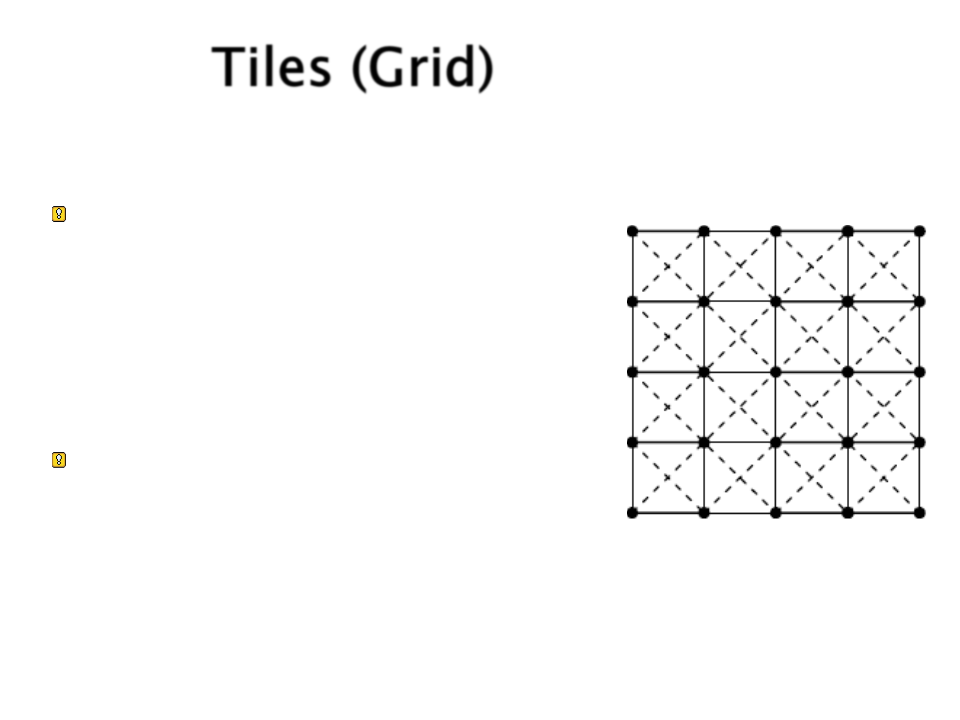
Tiles (Grid)
O grande problema desta
abordagem é que o número de
vértices e arestas pode se
tornar rapidamente muito
elevados.
Para um mapa com 100 x 100
células, tem-se 10.000 nós e
7
8.000 arestas.
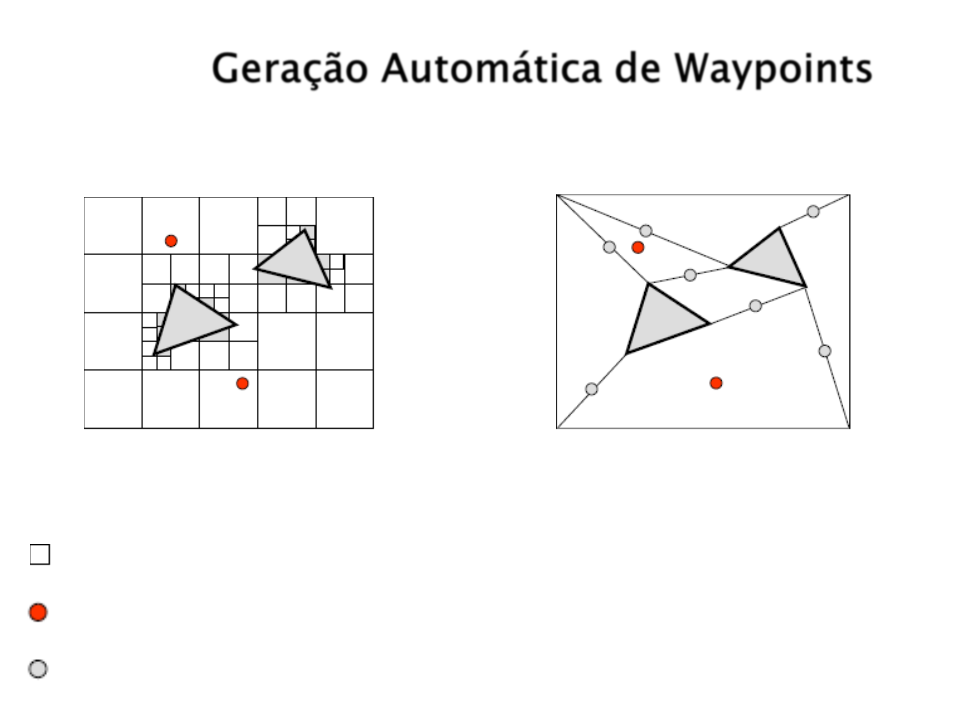
Geração Automática de Waypoints
Quadtree
Polígonos
Convexos
Waypoint no centro ou vértices
Waypoint de inicio ou objetivo
Waypoint
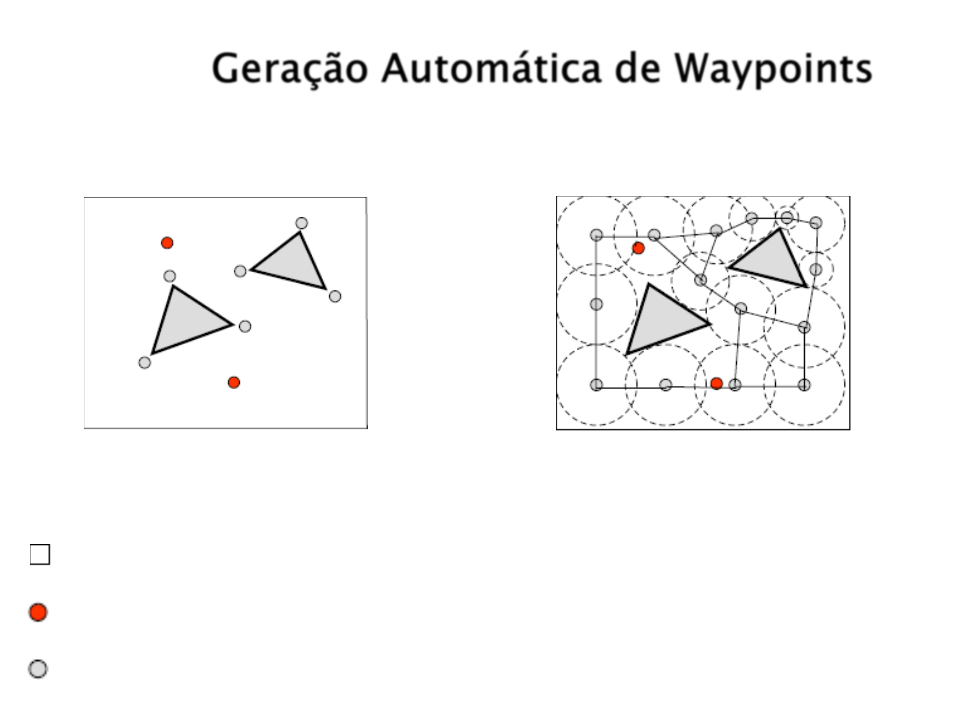
Geração Automática de Waypoints
Preenchimento de
Espaço com Círculos
ou Cilindros
Pontos de Canto
Waypoint no centro ou vértices
Waypoint de inicio ou objetivo
Waypoint

Pathfinding
Uma vez definido o grafo de navegação é possível
utilizar técnicas de busca para encontrar caminhos
entre dois pontos.
O algoritmo de busca mais utilizado em jogos é o
A*.
Normalmente é possível calcular boas funções
heurísticas.
O caminho gerado pelo A* é composto por uma
lista de vértices por onde o agente deve passar
para chegar ao destino.
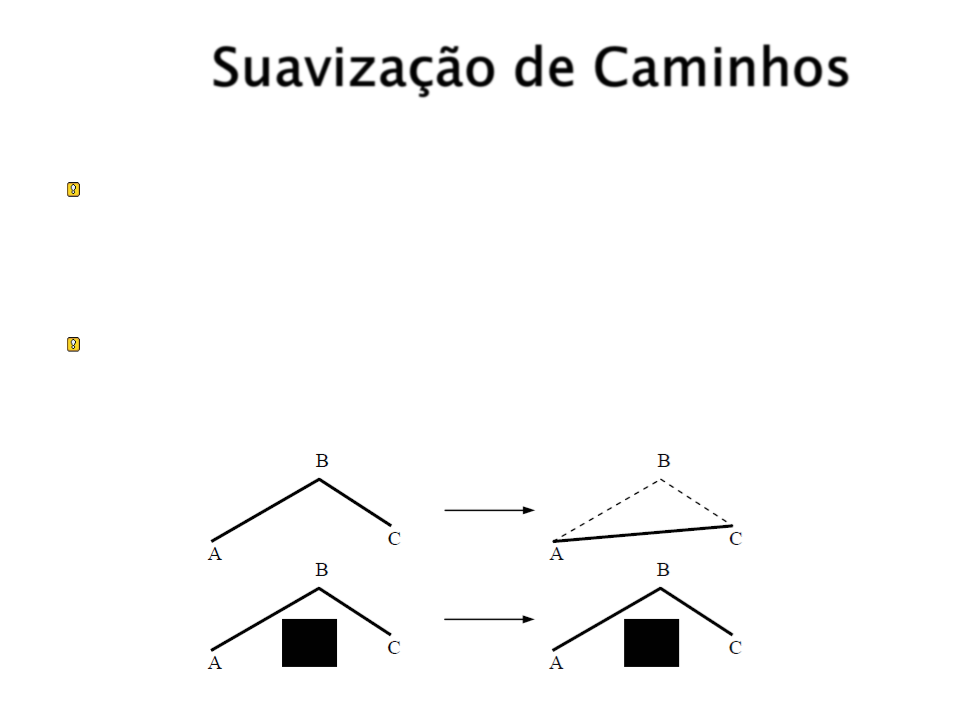
Suavização de Caminhos
Geralmente o caminho encontrado forma uma linha
sinuosa (zigzag), visto que o espaço representado
pelos waypoints é discretizado em pontos.
Geralmente sempre existe uma forma de suavizar o
caminho encontrado traçando-se um novo caminho
que remove vértices não necessários.
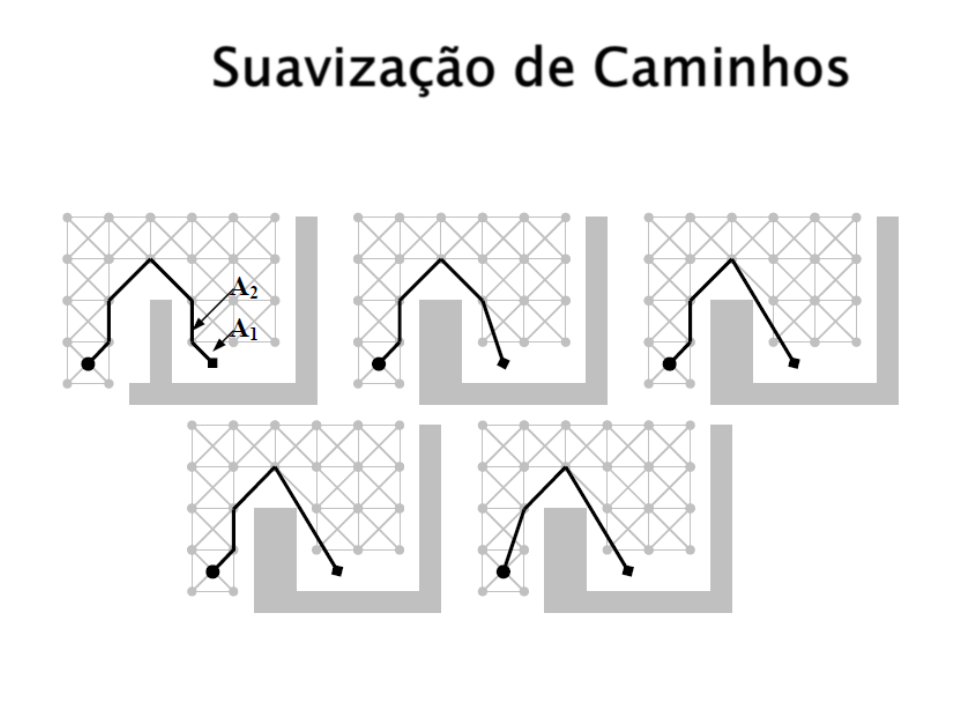
Suavização de Caminhos
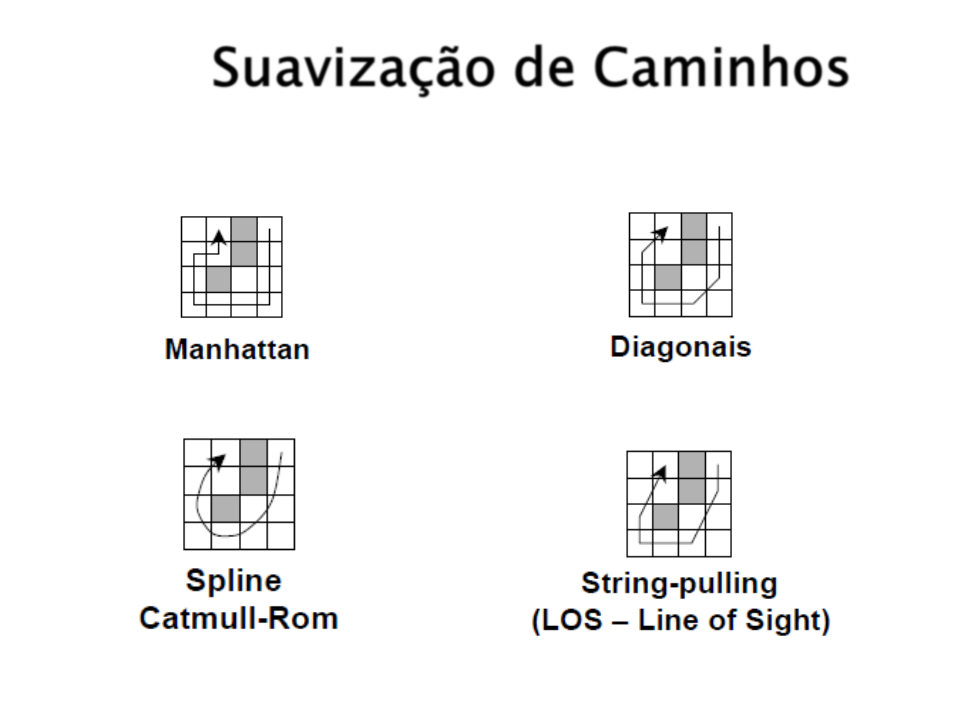
Suavização de Caminhos
Otimizações
Em algumas situação do jogo, pode necessário que
várias unidades realizem buscas por caminhos
simultaneamente.
Isso pode gerar um pico de carga da CPU que pode
resultar em interrupções momentâneas do fluxo do
jogo.
Técnicas de Otimização:
Caminhos pré-calculados
Custos pré-calculados
Busca de caminhos hierárquica.
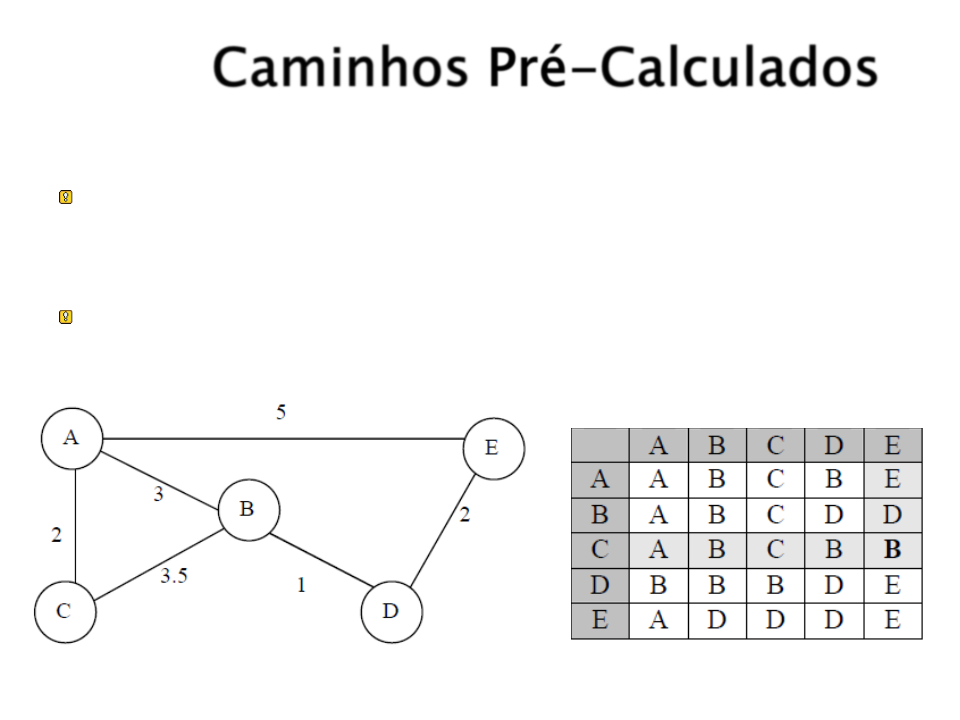
Caminhos Pré-Calculados
Tabela pré-calculada com os melhores caminhos do
grafo de navegação.
Armazena-se somente o próximo nó que deve ser
seguindo do nó atual ao nó destino.
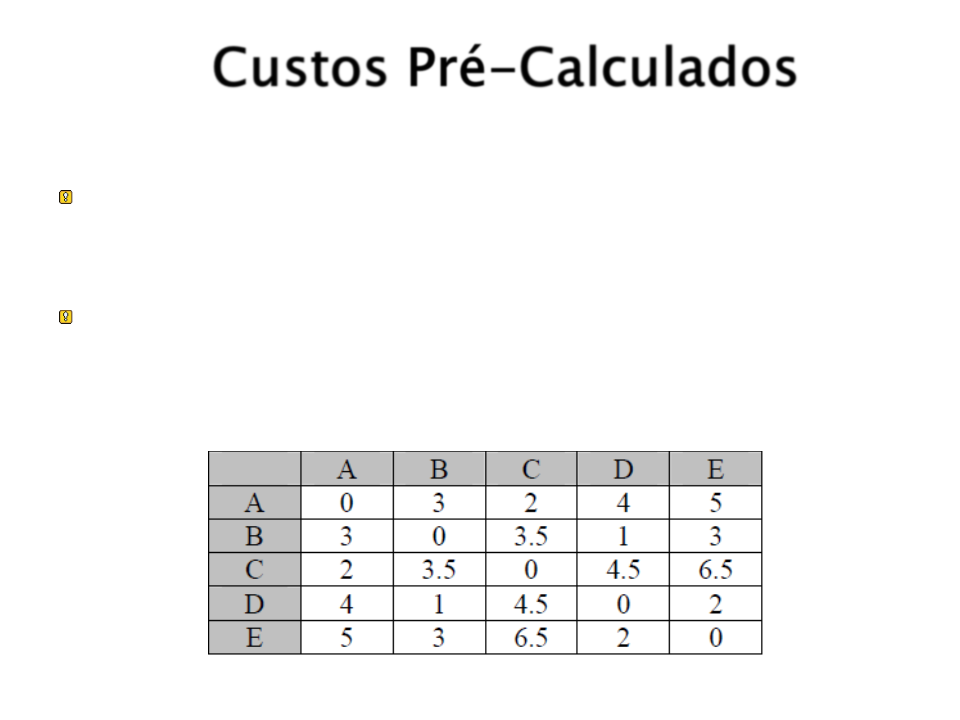
Custos Pré-Calculados
Saber qual o melhor caminho entre dois nós somente
é útil quando se sabe onde se deseja ir.
Uma tabela pré-calculada com os custos de
locomoção entre quaisquer dois nós também é uma
informação muito util.
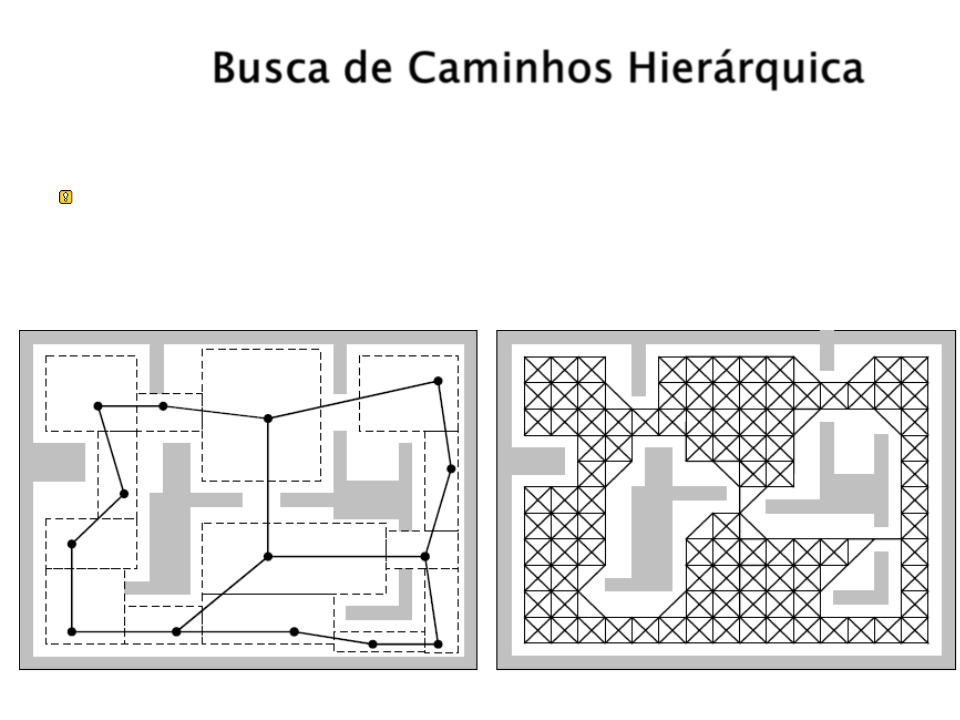
Busca de Caminhos Hierárquica
Está estratégia consiste em achar o caminho de modo
gradativo, partindo-se de uma solução grosseira até
uma solução mais refinada.