
INF 1771 – Inteligência Artificial
Aula 13 – Planejamento em Ambientes
Não-Determinísticos
Edirlei Soares de Lima
<elima@inf.puc-rio.br>
Planejamento Clássico
Em planejamento clássico, o ambiente do problema
precisa possuir as seguintes características:
Observável.
Estático.
Determinístico.
Supõe-se que as descrições das ações são sempre
corretas e completas. Nestas circunstâncias, um
agente poderia planejar e depois executar o plano
de olhos fechados.
Planejamento em Ambientes Incertos
Em ambientes incertos, um agente deve:
Usar seu sensores para descobrir o que está
acontecendo no ambiente enquanto o plano está
sendo executado.
Modificar ou substituir o plano se algo inesperado
acontecer.
Os agentes precisam lidar com informações
incompletas e incorretas.
Planejamento em Ambientes Não-Determinísticos
Existem 4 métodos de planejamento mais comuns
usados para lidar com o ambientes não-
determinísticos:
(
1) Planejamento sem sensores: Constrói-se planos
sequenciais normais (sem percepção), mas considera-se
todas as circunstâncias independentemente do estado
inicial.
(
2) Planejamento condicional: Constrói-se um plano
fixo com diferentes ramificações para diferentes
contingentes. Percebe-se o ambiente para saber que
ramo seguir.
Planejamento em Ambientes Não-Determinísticos
Métodos de planejamento para ambientes não-
determinísticos:
(
3) Monitoramento da execução com
replanejamento: Usa qualquer uma das técnicas
precedentes para construir o plano, mas monitora a
execução para ver se o plano pode ter sucesso no atual
estado ou precisa ser revisto. Replaneja no caso de algo
estar errado.
(
as ações, sendo capaz de tratar eventos inesperados,
mesmo durante a construção do plano.
4) Planejamento contínuo: Planeja-se continuamente
Planejamento Condicional
Aplicação em ambientes completamente
observáveis:
O agente sabe seu estado atual, mas se o ambiente for
não determinístico, ela não saberá o efeito de suas
ações.
Exemplo Aspirador de Pó:
às vezes suja o destino quando se move para lá.
às vezes suja se sugar em um local limpo.
Planejamento Condicional - Aspirador de Pó
Estados:
Inicial: AtRight CleanLeft CleanRight
Final: AtLeft CleanLeft CleanRight
A representação do espaço de busca é feita em uma
árvore and-or.
A solução é uma sub-árvore onde todos os nós folha
levam em algum ponto a solução do problema.
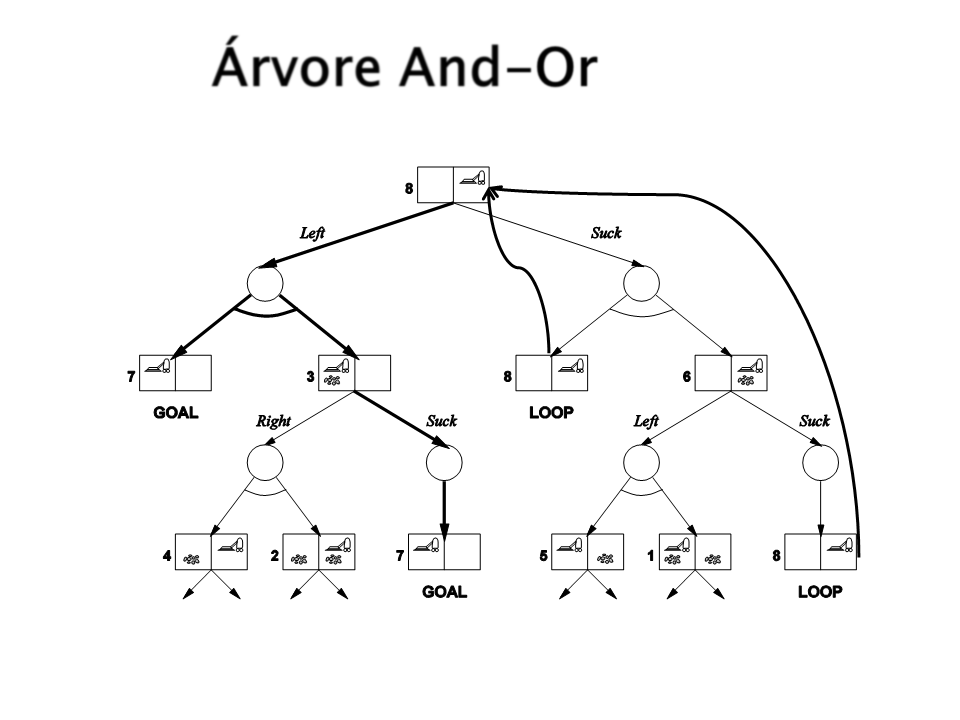
Árvore And-Or
OR
AND
AND
OR
OR
AND
AND
AND
AND
Planejamento Condicional
Ambientes parcialmente observáveis e não
determinísticos:
Os testes condicionais nem sempre funcionam...
Exemplo: aspirador só sabe se tem sujeira na sala em que ele está.
Belief state (estado de crença):
Ao invés de estado único, deve-se lidar explicitamente com a
ignorância para sempre estar consciente do que se sabe (ou do que
não se sabe).
Representado como um conjunto de estados possíveis.
Solução:
Grafos And-Or em estados de crença.
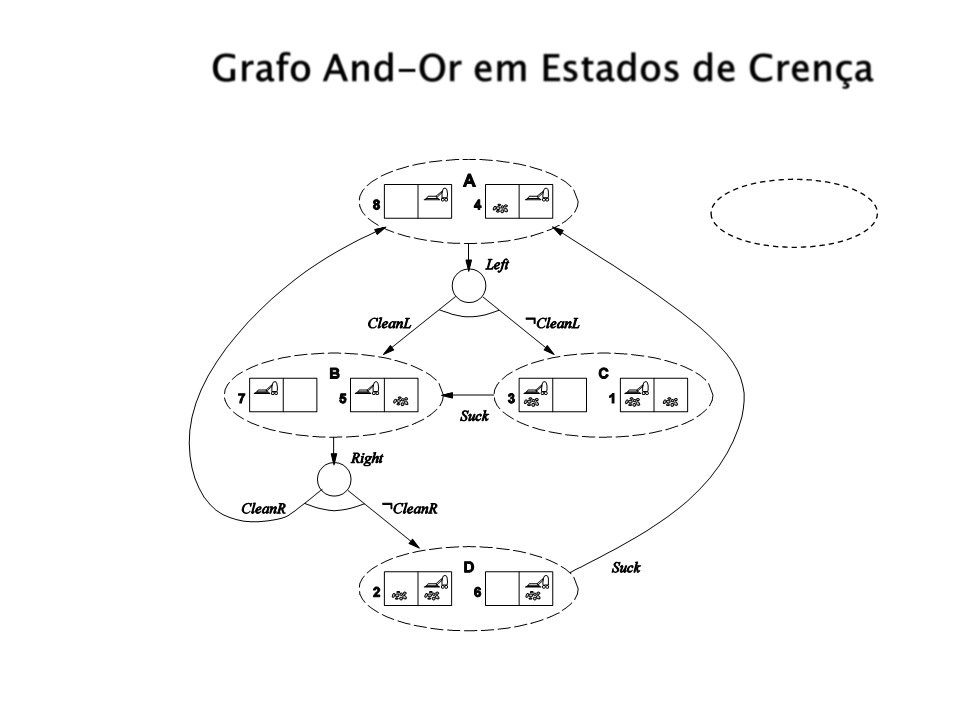
Grafo And-Or em Estados de Crença
Estado
de crença
Acreditava que
esquerda estava limpa
Acreditava que
esquerda estava suja
Monitoramento da Execução com Replanejamento
Monitoramento da execução checa as percepções para ver
se tudo está indo de acordo com o plano.
Existem dois tipos de monitoramento:
Monitoramento da ação: para ver se a próxima ação é
aplicável.
Exemplo: a porta está fechada.
Monitoramento do plano: ver se o plano ainda é viável
Exemplo: não tem mais dinheiro suficiente.
Replanejamento: Se algo inesperado acontece, pede-se ao
planejador um novo plano ou tentar reparar o plano antigo.
Monitoramento da Execução com Replanejamento
A estratégia monitoramento e replanejamento pode
ser aplicada em todos os tipos problemas.
Ambiente total ou parcialmente acessível.
Espaço de estados ou de planos.
Planos condicionais ou não.
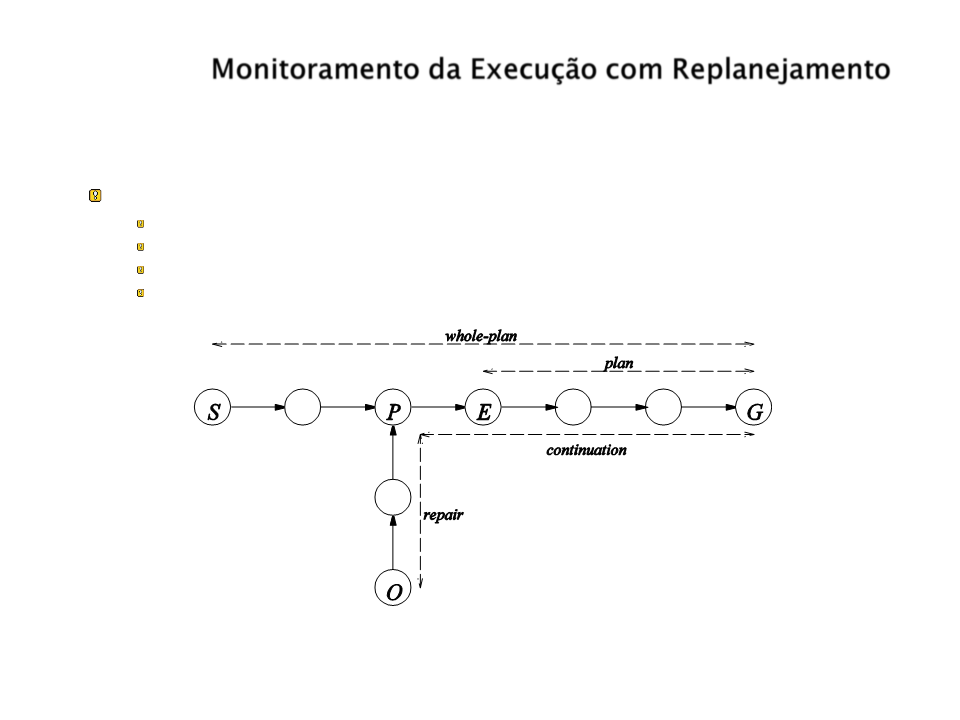
Monitoramento da Execução com Replanejamento
Monitoramento da ação (exemplo):
Whole plan = plano inteiro (inicial), S= start, G = goal.
Plan = plano que resta.
O agente deveria chegar em E mas foi para O.
Então tenta encontrar um plano que leve de O a qualquer ponto de WholePlan.
Monitoramento da Execução com Replanejamento
Monitorando plano:
Verifica, a cada passo, as pré-condições para o
sucesso do plano inteiro.
Problemático em ambientes parcialmente
acessíveis.
Pode-se perder mais tempo verificando todas as
condições do futuro plano do que agindo.
Deve ser sempre mantido o monitoramento
das ações.
Planejamento Contínuo
Diferenças:
Cria planos incrementalmente (dentro de limites de
tempo)
Pode começar a executar um plano mesmo que ele ainda
esteja incompleto.
Continua planejando durante a execução do plano.
Pode mudar de objetivo durante a execução do plano.
É capaz de intercalar continuamente entre:
Execução de passos (de percepção e efetivação).
Monitoramento.
Replanejamento.
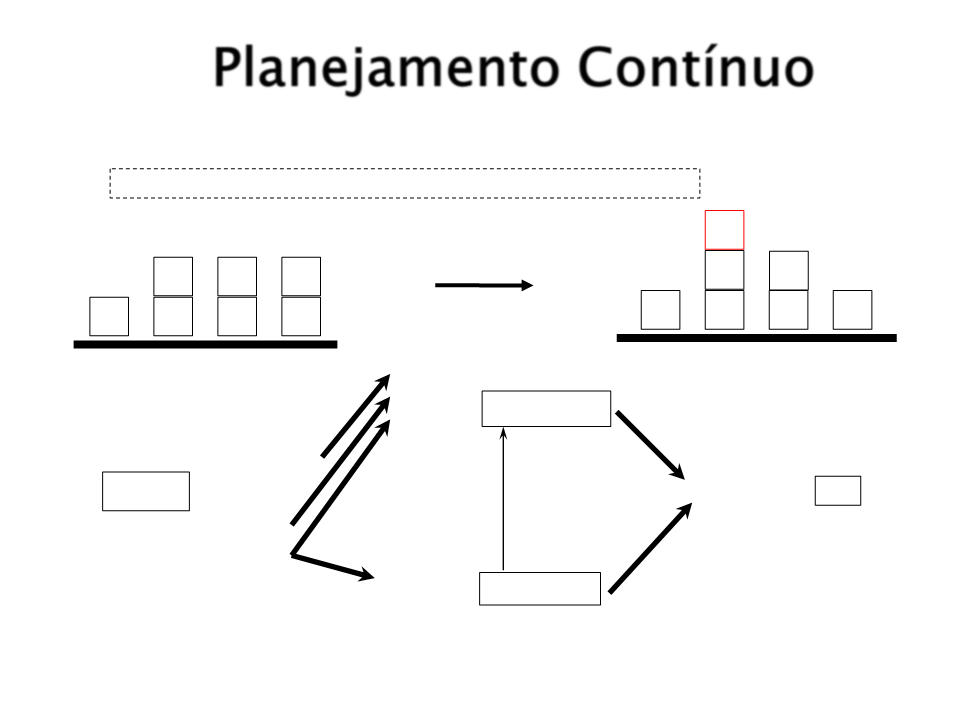
Planejamento Contínuo
Exemplo dos blocos:
Plano de ordem parcial condicional.
Mundo observável (mas funcionaria igual em um mundo não
observável)
Action(Mover (x, y),
PRECOND: Limpo(x) Limpo(y) EmCima(x,z)
EFFECT: EmCima (x,y) Limpo(z) EmCima(x,z) Limpo(y)).
C
D
Estado Inicial
Objetivo
B
A E F G
B C D
A E F G
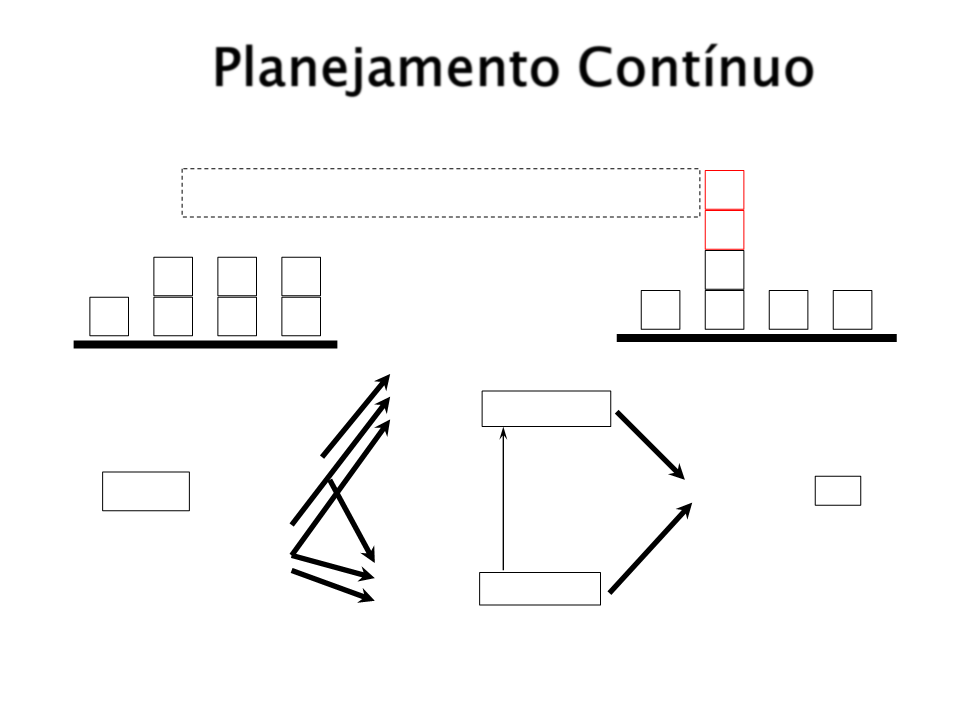
Planejamento Contínuo
Supondo que nada acontece enquanto se planeja, o plano é
rapidamente encontrado com planejamento de ordem parcial
C
D
B
B C D
A E F G
A E F G
EmCima (C,F)
Limpo (C)
Limpo (D)
Mover (C,D)
NaMesa (A)
EmCima (B,E)
EmCima (C,F)
EmCima (D,G)
Limpo (A)
EmCima (C,D)
EmCima (D,B)
Início
Fim
Limpo (C)
Limpo (D)
Limpo (B)
EmCima (D,G)
Limpo (D)
Limpo (B)
Mover (D,B)
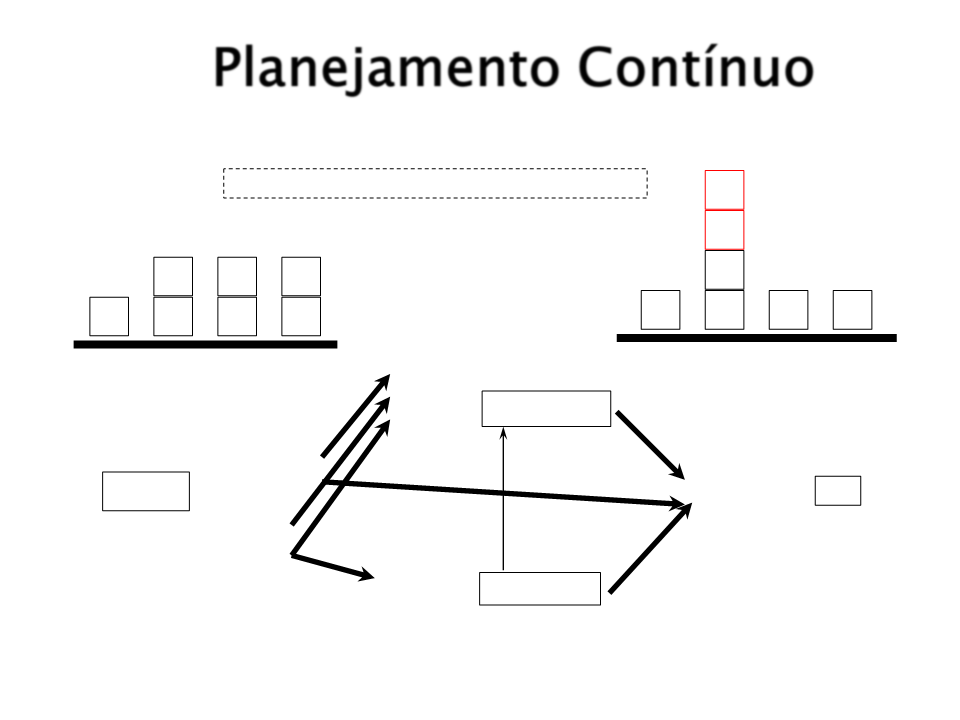
Planejamento Contínuo
Antes da execução das ações, algo faz com que o ambiente mude.
D
B
E
C
F G
B C D
A E F G
A
EmCima (C,F)
Limpo (C)
Limpo (D)
Mover (C,D)
NaMesa (A)
EmCima (B,E)
EmCima (C,F)
EmCima (D,B)
Limpo (A)
EmCima (C,D)
EmCima (D,B)
Início
Fim
Limpo (C)
Limpo (D)
Limpo (G)
EmCima (D, y)
Limpo (D)
Limpo (B)
Plano Incompleto!
Mover (D,B)
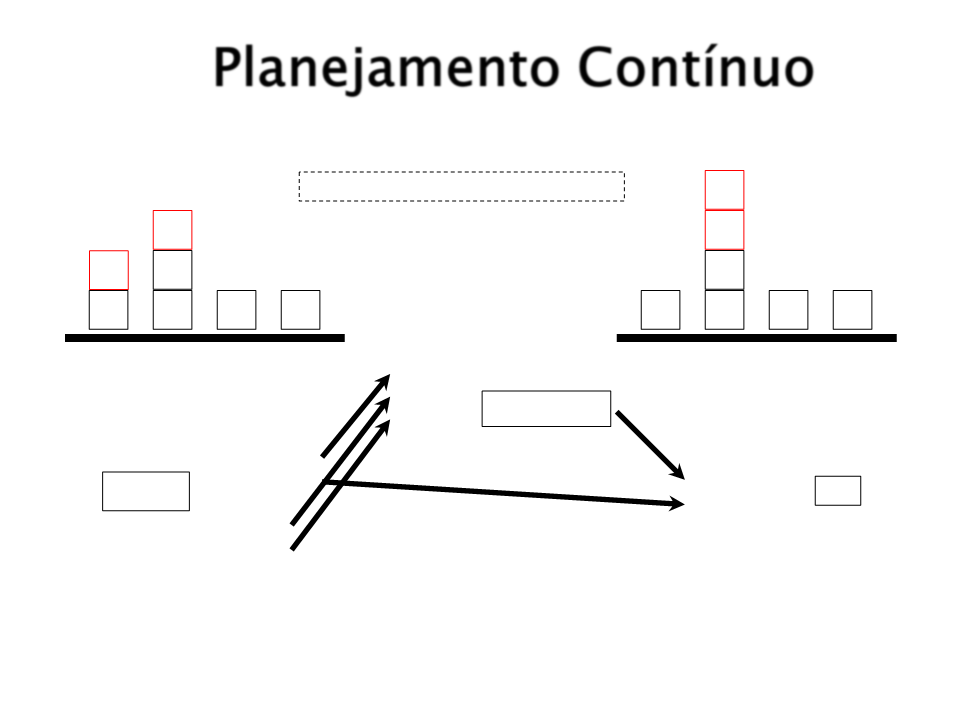
Planejamento Contínuo
O plano é refeito estendendo-se um link casual.
C
D
B
B C D
A E F G
A E F G
EmCima (C,F)
Limpo (C)
Limpo (D)
Mover (C,D)
NaMesa (A)
EmCima (B,E)
EmCima (C,F)
EmCima (D,B)
Limpo (A)
EmCima (C,D)
EmCima (D,B)
Início
Fim
Limpo (C)
Limpo (D)
Limpo (G)
EmCima (D, y)
Limpo (D)
Limpo (B)
Plano completo!
porem redundante...
Mover (D,B)
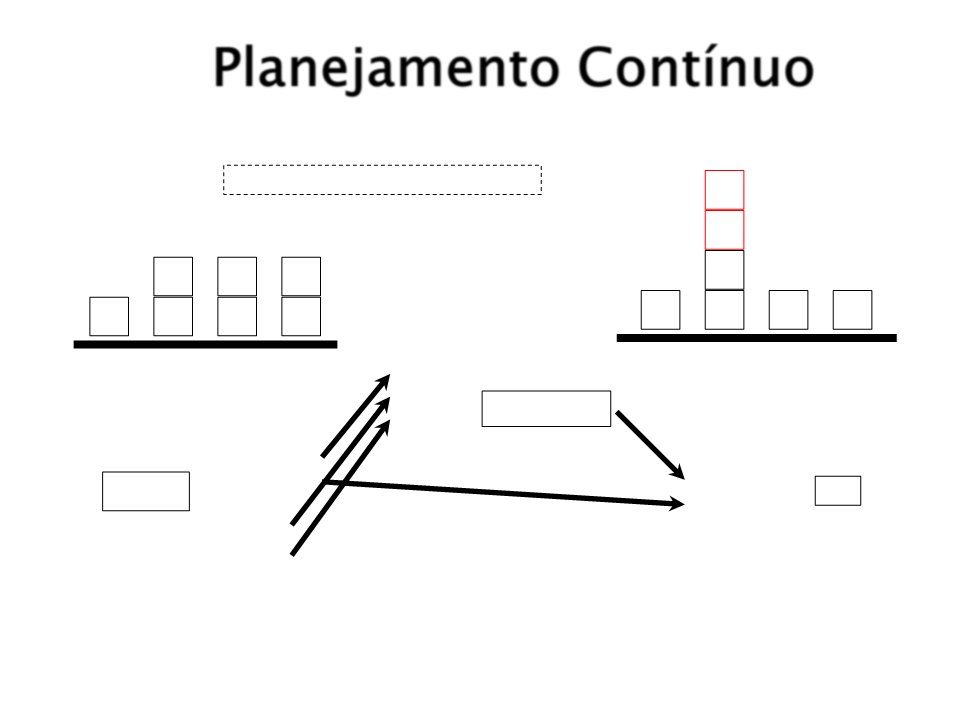
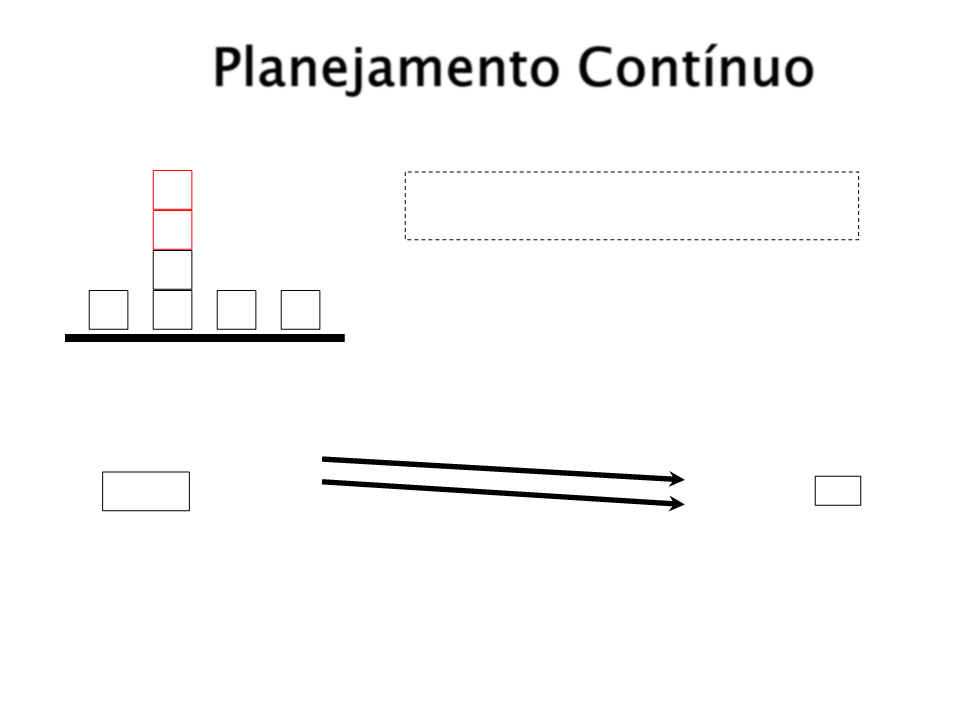
Planejamento Contínuo
Elemina-se os passos redundantes.
C
D
B
B C D
A E F G
A E F G
EmCima (C,F)
Limpo (C)
Limpo (D)
Mover (C,D)
NaMesa (A)
EmCima (B,E)
EmCima (C,F)
EmCima (D,B)
Limpo (A)
EmCima (C,D)
EmCima (D,B)
Início
Fim
Limpo (C)
Limpo (D)
Limpo (G)
Plano completo!
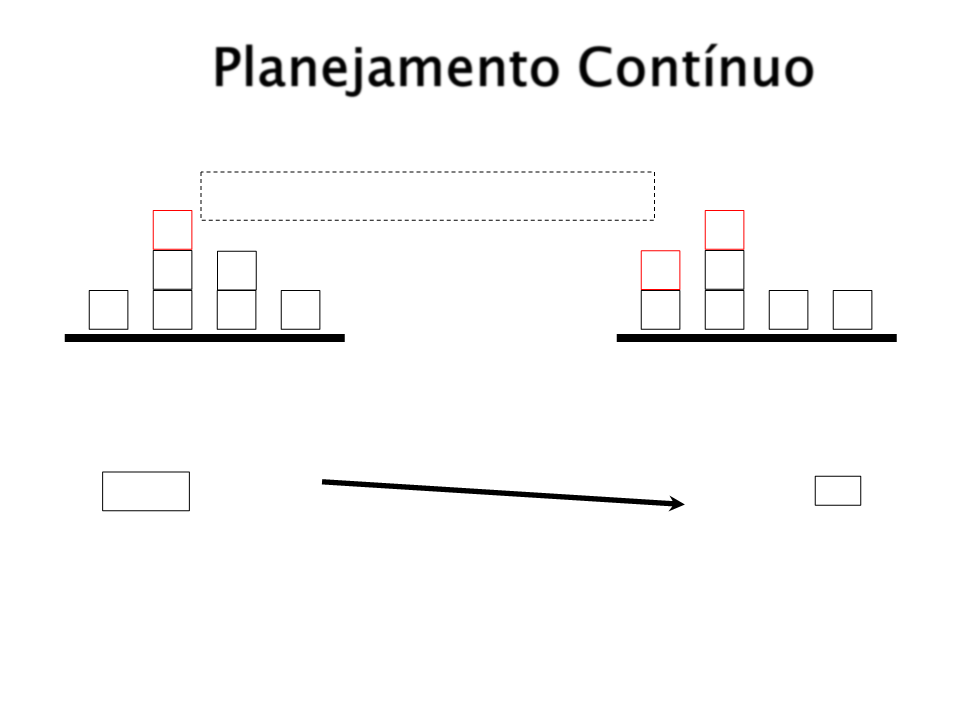
Planejamento Contínuo
O agente é desastrado... Acaba colocando C em cima
de A ao invés de D.
D
B
E
D
C B
A E
C
F G
A
F
G
NaMesa (A)
EmCima (B,E)
EmCima (C,F)
EmCima (D,B)
Limpo (F)
EmCima (C,D)
EmCima (D,B)
Início
Fim
Limpo (C)
Limpo (D)
Limpo (G)
Planejamento Contínuo
Adiciona-se um novo passo ao plano.
C
D
C B
A E
D
B
E
F
G
A
F
G
EmCima (C,A)
Limpo (C)
Limpo (D)
Mover (C,D)
NaMesa (A)
EmCima (B,E)
EmCima (C,A)
EmCima (D,B)
Limpo (F)
EmCima (C,D)
EmCima (D,B)
Início
Fim
Limpo (C)
Limpo (D)
Limpo (G)
Planejamento Contínuo
Finalmente o agente consegue realizar o movimento
com sucesso e chegar no estado final. Agora ele pode
buscar um novo objetivo.
C
D
B
A E F G
NaMesa (A)
EmCima (B,E)
EmCima (C,D)
EmCima (D,B)
Limpo (F)
EmCima (C,D)
EmCima (D,B)
Início
Fim
Limpo (C)
Limpo (D)
Limpo (G)