Artificial Intelligence
Lecture 03 – Finite State Machines
Edirlei Soares de Lima
<edirlei.slima@gmail.com>
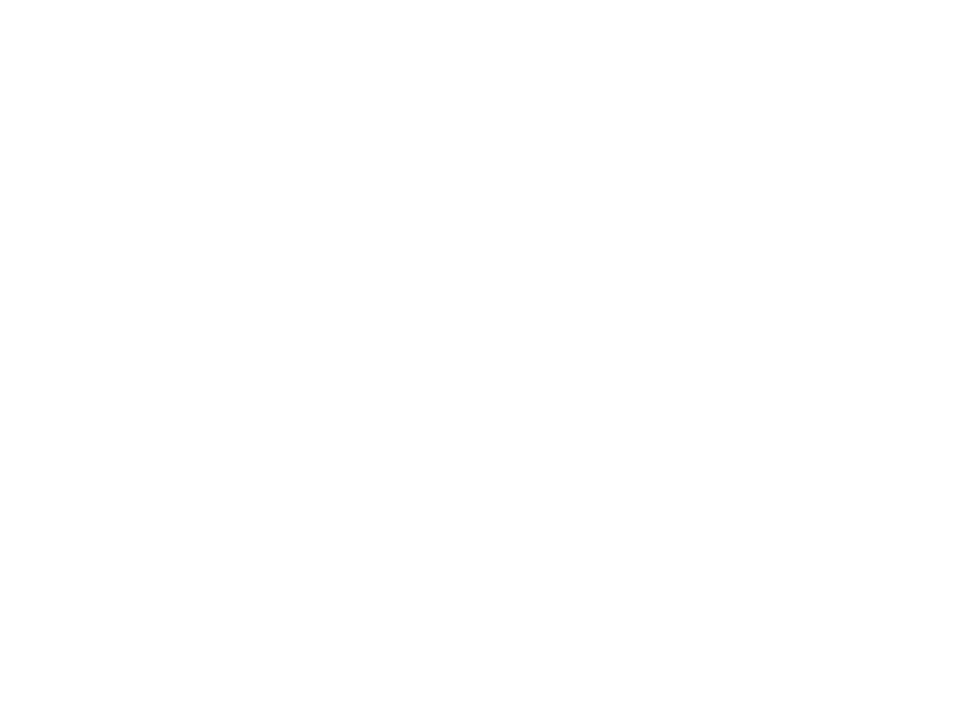
Game AI – Model
•
•
•
•
•
•
•
•
Pathfinding
Steering behaviours
Finite state machines
Automated planning
Behaviour trees
Randomness
Sensor systems
Machine learning

Decision Making
•
•
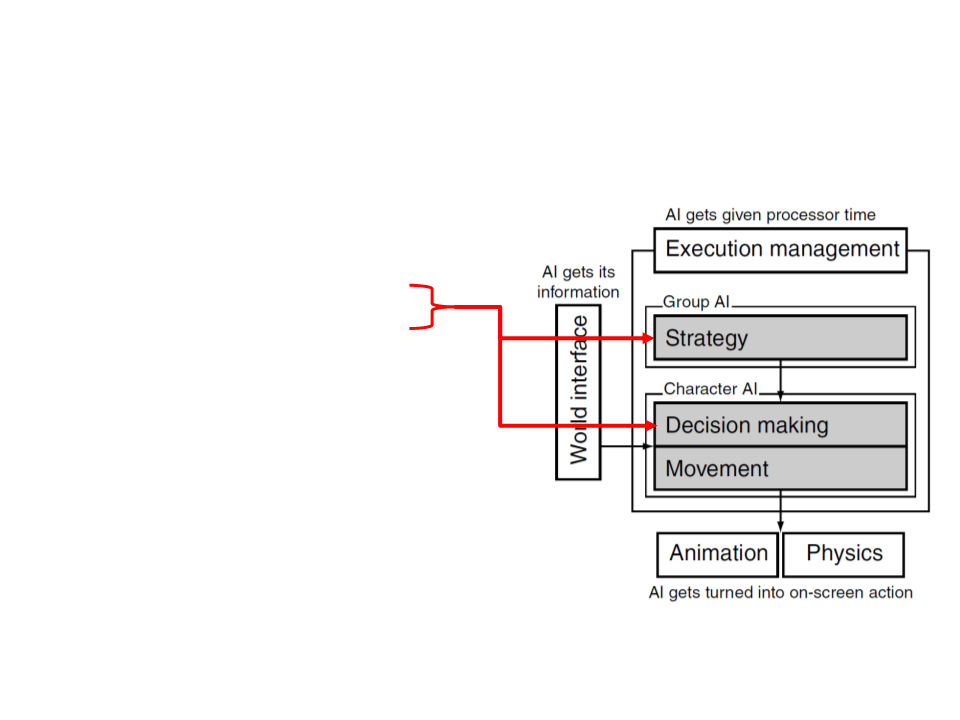
In game AI, decision making is the ability
of a character/agent to decide what to
do.
The agent processes a set of information
that it uses to generate an action that it
wants to carry out.
–
Input: agent’s knowledge about the world;
–
Output: an action request;
Decision Making
•
The knowledge can be broken down into external and
internal knowledge.
–
External knowledge: information about the game environment (e.g.
characters’ positions, level layout, noise direction).
–
Internal knowledge: information about the character’s internal state
(e.g. health, goals, last actions).

Finite State Machines
•
Usually, game characters have a limited set of possible
behaviors. They carry on doing the same thing until some
event or influence makes them change.
–
Example: a guard will stand at its post until it notices the player, then it
will switch into attack mode, taking cover and firing.
•
•
State machines are the technique most often used for this
kind of decision making process in games.
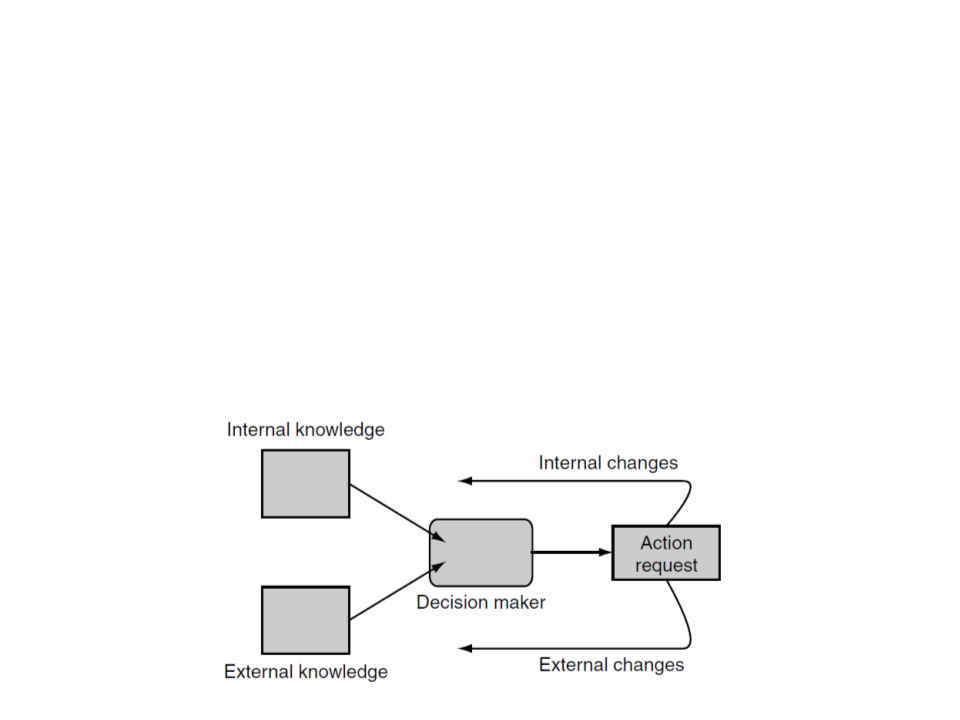
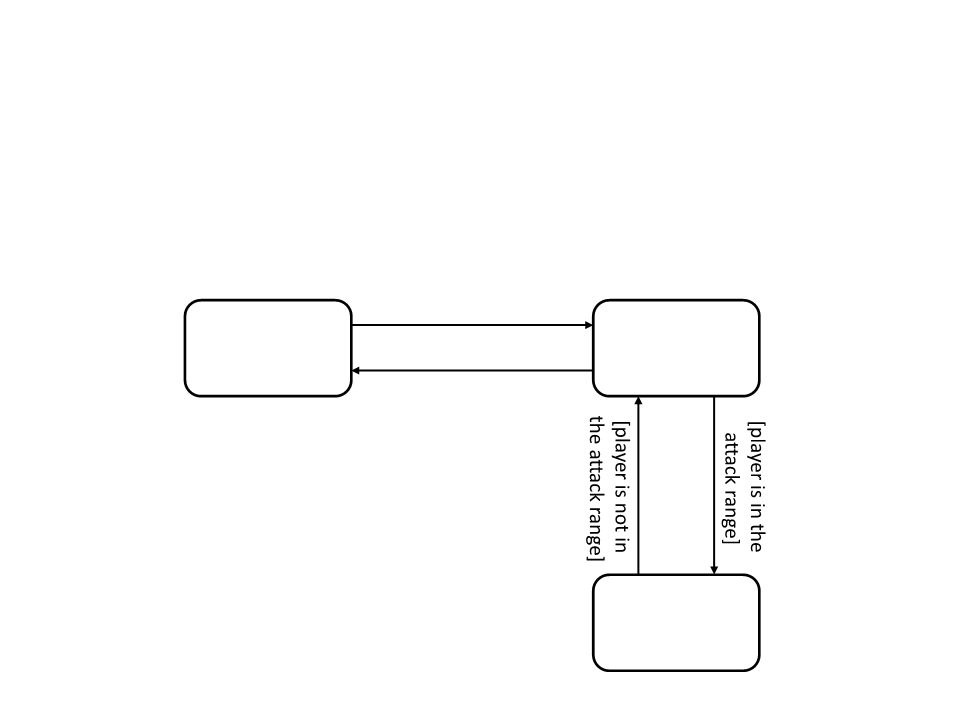
What is a state machine?
Finite State Machines
•
•
Actions or behaviors are associated
with each state.
Each transition leads from one state
to another, and each has a set of
associated conditions.
•
•
When the conditions of a transition
are met, then the character changes
state to the transition’s target state.
Each character is controlled by one
state machine and they have a
current state.
Hard-Coded Finite State Machines
enum State {PATROL, DEFEND, SLEEP};
State myState;
function update(){
if (myState == PATROL){
if (canSeePlayer())
myState = DEFEND;
if (tired())
myState = SLEEP;
}
elseif (myState == DEFEND){
if not canSeePlayer()
myState = PATROL;
}
elseif (myState == SLEEP){
if (not tired())
myState = PATROL;
}
}
Exercise 1
1
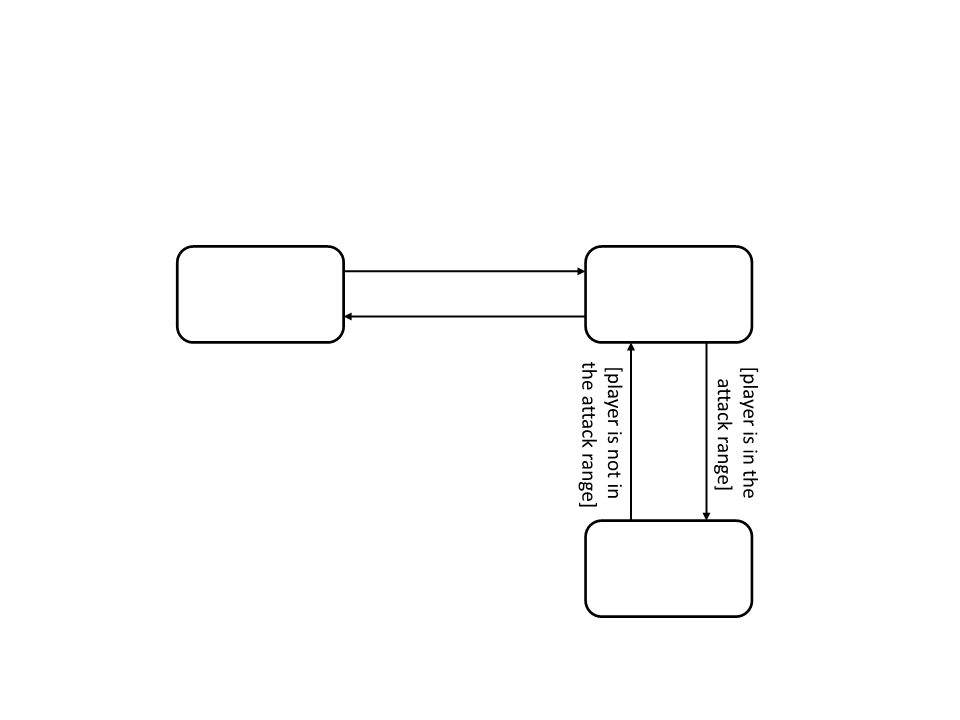
) Implement a hard-coded finite state machine to control an
NPC based on the following diagram:
[
can see the player]
Patrol
Chase
[
can’t see the player]
Tips:
•
Use the pathfinding maze created
in last lecture as the base project.
Create a list of waypoints to define
the patrol areas.
•
Attack
Hard-Coded Finite State Machines
•
•
•
Although hard-coded state machines are easy to write and are
very fast, they are notoriously difficult to maintain.
Complex finite states machines require thousands of lines of
code.
Another weaknesses:
–
Programmers are responsible for writing the AI behaviors of each
character.
–
The game has to be recompiled each time the behavior changes.
Class-Based Finite State Machines
class StateMachine{
private List<State> states;
private State initialState;
private State currentState = initialState;
List<Action> update(){
triggeredTransition = Transition.None;
for each Transition t in currentState.getTransitions(){
if (t.isTriggered()){
triggeredTransition = t;
break;
}
}
...
Class-Based Finite State Machines
...
if (triggeredTransition)
{
targetState = triggeredTransition.getTargetState();
List<Action> actions = new List<Action>();
actions.Add(currentState.getExitAction());
actions.Add(triggeredTransition.getAction());
actions.Add(targetState.getEntryAction());
currentState = targetState;
return actions;
}
}
else
{
return currentState.getAction();
}
}
Class-Based Finite State Machines
•
•
The class-based approach gives a lot of flexibility to the Finite
States Machines, but reduces its performance due to the large
number of method calls.
Another alternative: Script-Based Finite States Machines
–
Scripting languages: Lua, Pawn, GameMonkey, ...
–
Allows designers to create the state machine rules but can be slightly
more efficient.
–
However, interpreting a script is at least as time consuming as
executing a large number of method calls.
Unity – Implementation
[
can see the player]
Patrol
Chase
[
can’t see the player]
Attack
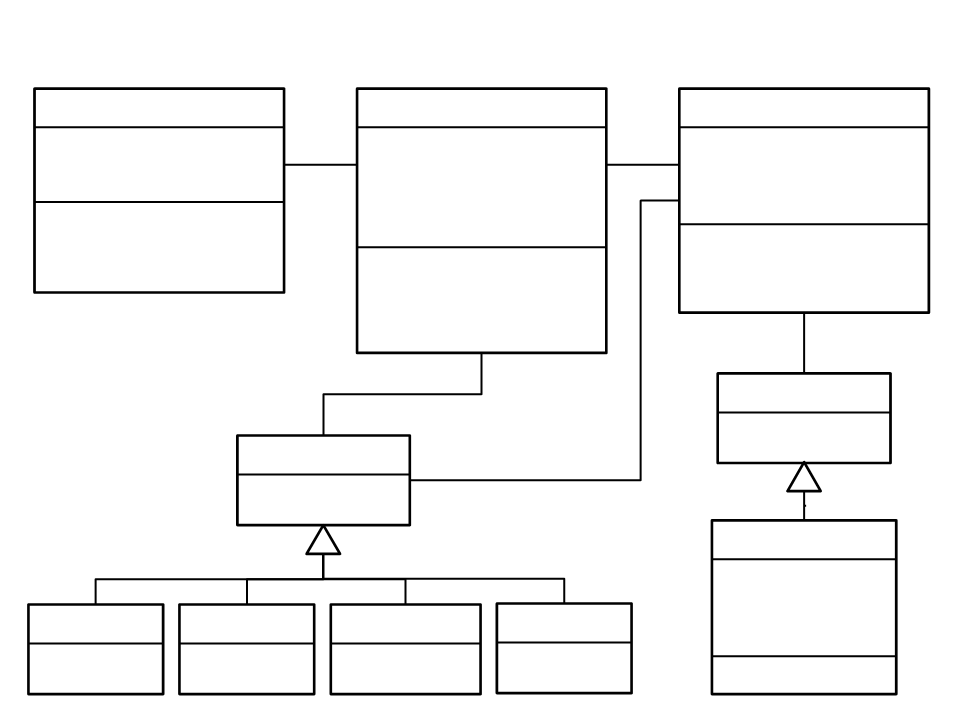
Class Diagram
Finite State Machine
State
Transition
1
1.*
1
1.*
1
+
initialState: State;
-entryAction: Action;
-stateActions: Action[];
-decision: Condition;
-action: Action;
-targetState: State;
-
currentState: State;
-
-transitions: Transition[];
exitAction: Action;
-
-
-
Start();
Update();
DoActions(actions);
+IsTriggered(fsm):bool;
+GetTargetState():State;
+GetAction():Action;
+GetActions():Action[];
+
+
+
GetEntryAction():Action;
GetExitAction():Action;
GetTransitions():Transition[];
1
1.*
1
Condition
1
.*
+
abstract Test(fsm);
Action
1
+
abstract Act(fsm);
Can See Condition
-
-
-
negation:bool;
viewAngle:float;
viewDistance:float;
Patrol Action
Chase Action
Attack Action
Stop Action
+
Act(fsm);
+Act(fsm);
+Act(fsm);
+Act(fsm);
+
Test(fsm);
Unity – ScriptableObject
•
•
In Unity, a ScriptableObject is a class that allows you to store
data and execute code independent from script instances.
They can also be used to create pluggable data sets.
–
They work like the MonoBehaviour class, but they don’t need to be
attached to GameObjects.
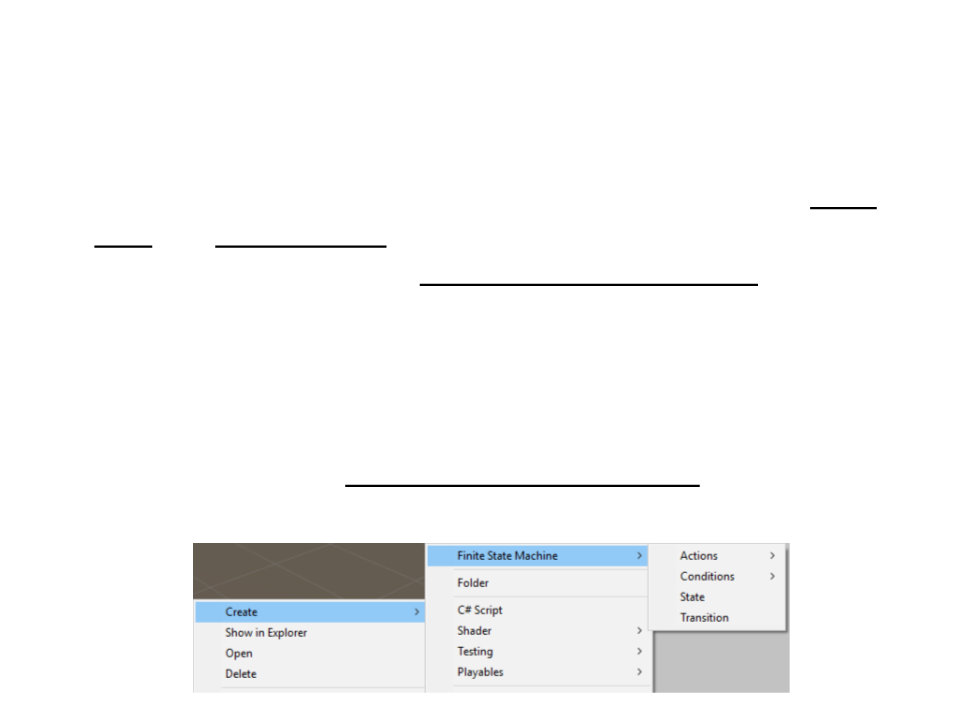
Once a ScriptableObject-derived class have been defined, is
possible to use the CreateAssetMenu attribute to make it easy
to create custom assets of the class.
Unity – ScriptableObject
•
ScriptableObjects allow us to create a pluggable finite state
machine system.
Action Classes
•
Action Class:
public abstract class Action : ScriptableObject
{
public abstract void Act(FiniteStateMachine fsm);
}
Action
+
abstract Act(fsm);
•
Patrol Action Class:
[CreateAssetMenu(menuName = "Finite State Machine
/Actions/Patrol")]
public class PatrolAction : Action
{
Patrol Action
public override void Act(FiniteStateMachine fsm)
{
+
Act(fsm);
if (fsm.GetNavMeshAgent().IsAtDestionation())
fsm.GetNavMeshAgent().GoToNextWaypoint();
}
}
Action Classes
•
Chase Action Class:
[CreateAssetMenu(menuName = "Finite State Machine/Actions/Chase")]
public class ChaseAction : Action
{
public override void Act(FiniteStateMachine fsm)
{
if (fsm.GetNavMeshAgent().IsAtDestionation())
fsm.GetNavMeshAgent().GoToTarget();
}
}
•
Stop Action Class:
[CreateAssetMenu(menuName = "Finite State Machine/Actions/Stop")]
public class StopAction : Action{
public override void Act(FiniteStateMachine fsm)
{
fsm.GetNavMeshAgent().StopAgent();
}
}
Action Classes
•
Attack Action Class:
[CreateAssetMenu(menuName = "Finite State Machine/Actions/Attack")]
public class AttackAction : Action {
public GameObject shootPrefab;
public float shootTimeInverval = 2;
private float shootTime = float.PositiveInfinity;
public override void Act(FiniteStateMachine fsm)
{
shootTime += Time.deltaTime;
if (shootTime > shootTimeInverval){
shootTime = 0;
GameObject bullet = Instantiate(shootPrefab,
fsm.transform.position, fsm.transform.rotation);
bullet.GetComponent<Rigidbody>().velocity =
fsm.transform.TransformDirection(Vector3.forward * 10);
}
}
}
Action Classes
•
Condition Class:
public abstract class Condition : ScriptableObject
{
public abstract bool Test(FiniteStateMachine fsm);
}
Condition
+
abstract Test(fsm);
•
Can See Condition Class:
[
CreateAssetMenu(menuName = "Finite State Machine
Conditions/Can See")]
public class CanSeeCondition : Condition {
SerializeField]
private bool negation;
SerializeField]
private float viewAngle;
SerializeField]
private float viewDistance;
..
Can See Condition
/
-
-
negation:bool;
viewAngle:float;
[
-viewDistance:float;
[
+
Test(fsm);
[
.
Condition Classes
...
public override bool Test(FiniteStateMachine fsm){
Transform target = fsm.GetNavMeshAgent().target;
Vector3 targetDir = target.position - fsm.transform.position;
float angle = Vector3.Angle(targetDir, fsm.transform.forward);
float dist = Vector3.Distance(target.position,
fsm.transform.position);
if ((angle < viewAngle) && (dist < viewDistance)){
if (negation)
return false;
else
return true;
}else{
if (negation)
return true;
else
return false;
}
}
}
Transition Class
[CreateAssetMenu(menuName = "Finite State Machine
/
Transition")]
public class Transition : ScriptableObject{
SerializeField]
private Condition decision;
SerializeField]
private Action action;
SerializeField]
Transition
[
-
-
decision: Condition;
action: Action;
-targetState: State;
[
+
+
+
IsTriggered(fsm):bool;
GetTargetState():State;
GetAction():Action;
[
private State targetState;
public bool IsTriggered(FiniteStateMachine fsm){
return decision.Test(fsm);
}
public State GetTargetState(){
return targetState;
}
public Action GetAction(){
return action;
}
}
State Class
[
CreateAssetMenu(menuName = "Finite State Machine/State")]
public class State : ScriptableObject{
SerializeField]
private Action entryAction;
SerializeField]
private Action[] stateActions;
SerializeField]
private Action exitAction;
SerializeField]
[
[
[
State
[
-
entryAction: Action;
private Transition[] transitions;
public Action[] GetActions(){
return stateActions;
-stateActions: Action[];
-
-
exitAction: Action;
transitions: Transition[];
}
public Action GetEntryAction(){
+
+
+
+
GetActions():Action[];
GetEntryAction():Action;
GetExitAction():Action;
GetTransitions():Transition[];
return entryAction;
}
public Action GetExitAction(){
return exitAction;
}
public Transition[] GetTransitions(){
return transitions;
}
}
Finite State Machine Class
public class FiniteStateMachine : MonoBehaviour {
public State initialState;
Finite State Machine
private State currentState;
private MyNavMeshAgent navMeshAgent;
+initialState: State;
-currentState: State;
-
-
-
Start();
Update();
DoActions(actions);
void Start(){
currentState = initialState;
navMeshAgent = GetComponent<MyNavMeshAgent>();
}
void Update(){
Transition triggeredTransition = null;
foreach (Transition t in currentState.GetTransitions()){
if (t.IsTriggered(this)){
triggeredTransition = t;
break;
}
}
...
Finite State Machine Class
List<Action> actions = new List<Action>();
if (triggeredTransition){
State targetState = triggeredTransition.GetTargetState();
actions.Add(currentState.GetExitAction());
actions.Add(triggeredTransition.GetAction());
actions.Add(targetState.GetEntryAction());
currentState = targetState;
}
else{
foreach (Action a in currentState.GetActions())
actions.Add(a);
}
DoActions(actions);
}
void DoActions(List<Action> actions){
foreach (Action a in actions){
if (a != null)
a.Act(this);
}
}
}
Nav Mesh Agent
public class MyNavMeshAgent : MonoBehaviour {
public Transform target;
public Transform[] waypoints;
private int currentWaypoint;
private NavMeshAgent agent;
void Start(){
currentWaypoint = 0;
agent = GetComponent<NavMeshAgent>();
}
public void GoToNextWaypoint(){
agent.destination = waypoints[currentWaypoint].position;
currentWaypoint++;
if (currentWaypoint >= waypoints.Length)
currentWaypoint = 0;
}
...
Nav Mesh Agent
public void GoToTarget(){
agent.destination = target.position;
}
public void StopAgent(){
agent.isStopped = true;
agent.ResetPath();
}
public bool IsAtDestionation(){
if (!agent.pathPending){
if (agent.remainingDistance <= agent.stoppingDistance){
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f){
return true;
}
}
}
return false;
}
}
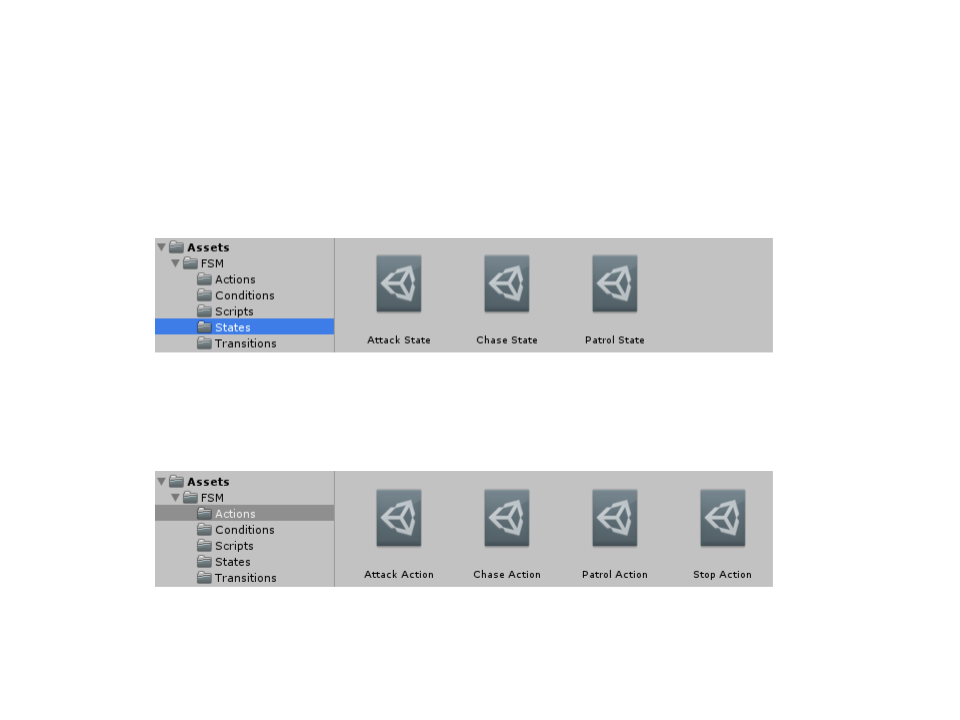
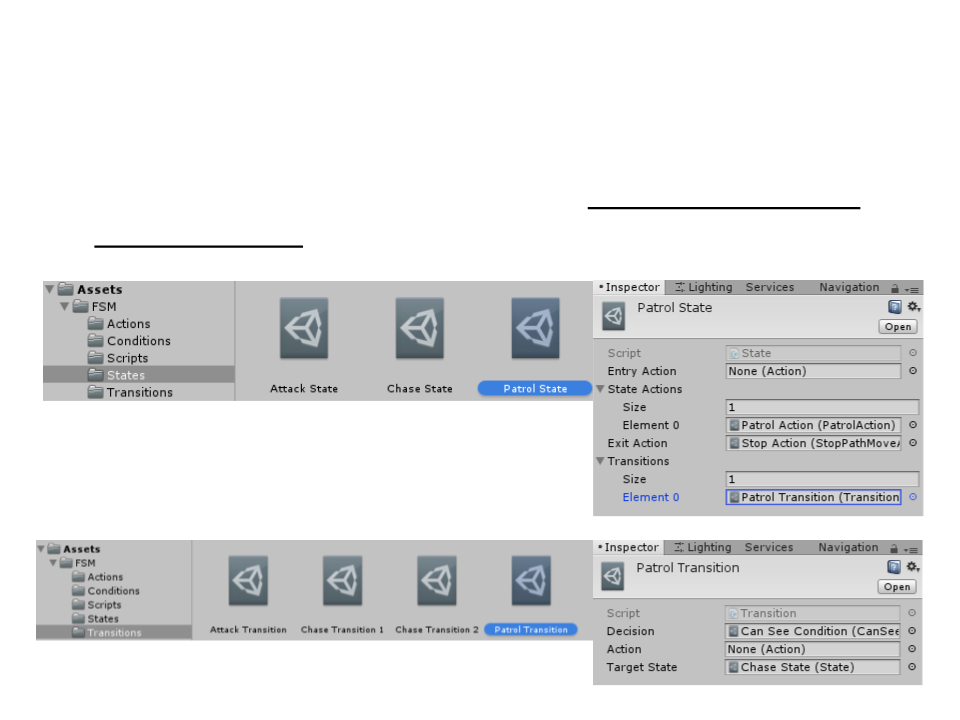
Finite State Machine – Objects
•
•
States:
Actions:
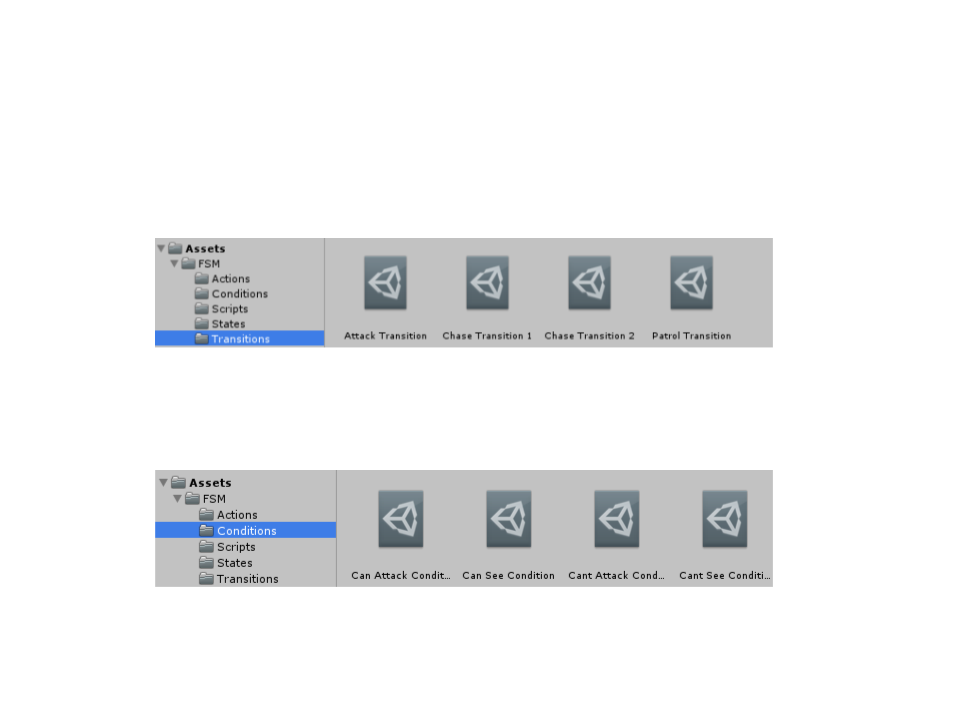
Finite State Machine – Objects
•
•
Transitions:
Conditions:
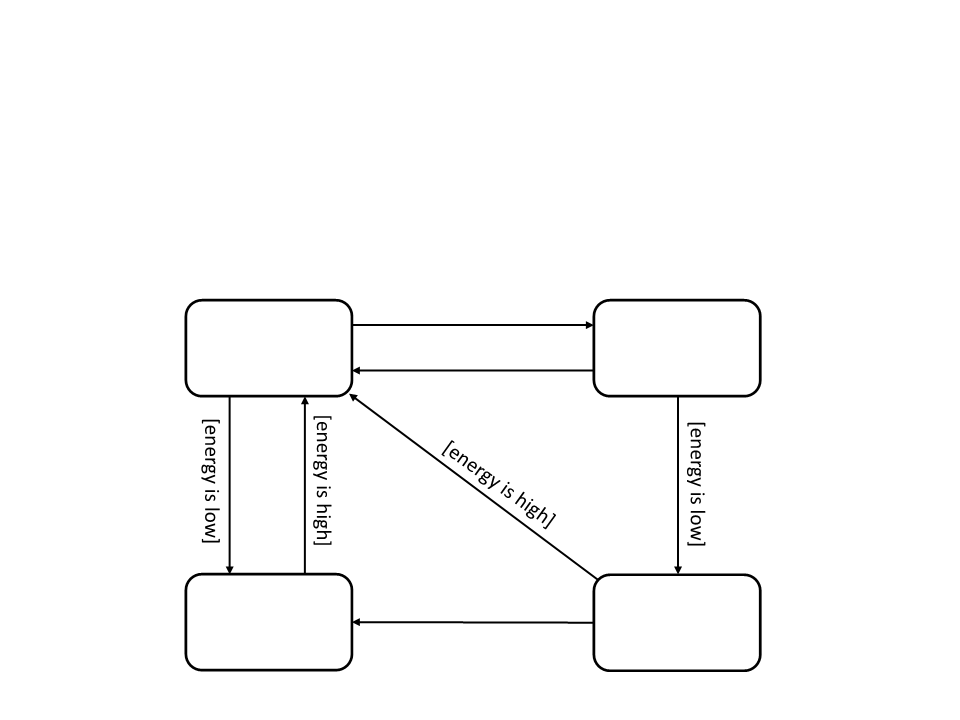
Exercise 2
2
) Implement the AI of an NPC using the following finite state
machine and the pluggable FSM system:
[
found the player]
Search
Attack
[
player died or run away]
[
escaped and energy is low]
Recover
Energy
Run Away
Finite State Machines
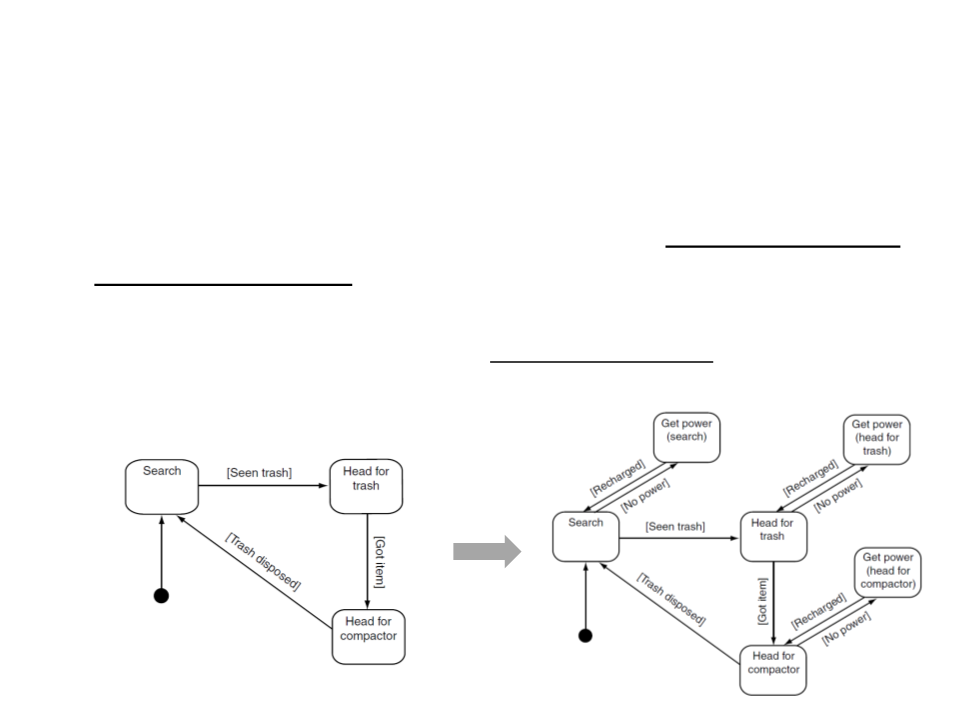
•
On its own, a state machine is a powerful tool, but as the
complexity of agent behavior increases, the state machine can
grow uncontrollably.
–
Even the visual representation becomes complex.
–
It can also be difficult to express composed behaviors (e.g. a recharge
behavior that can occur at any state).
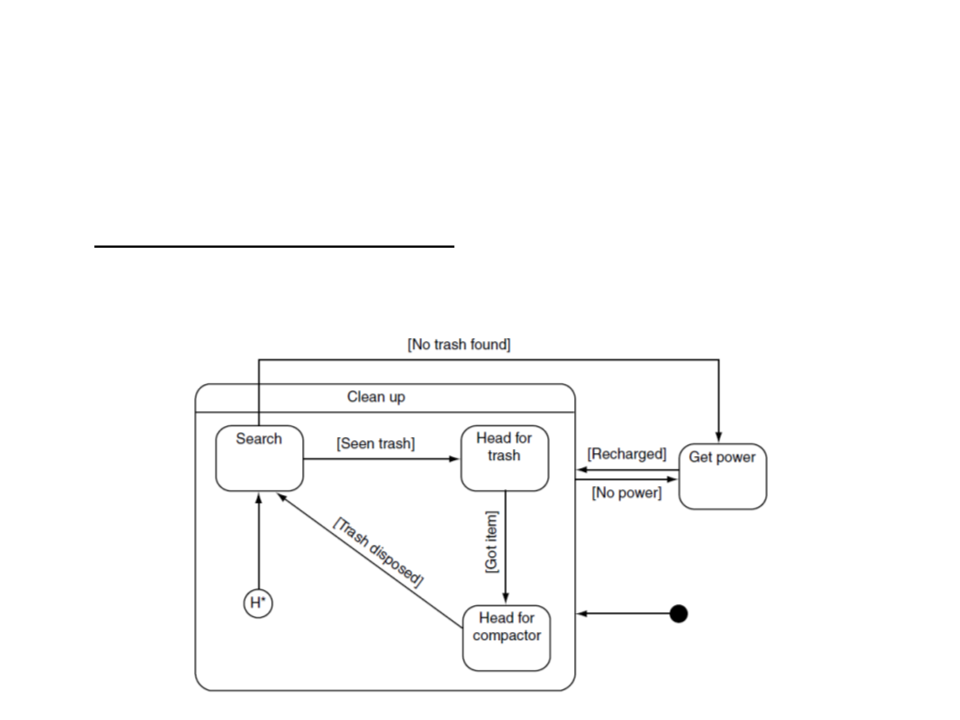
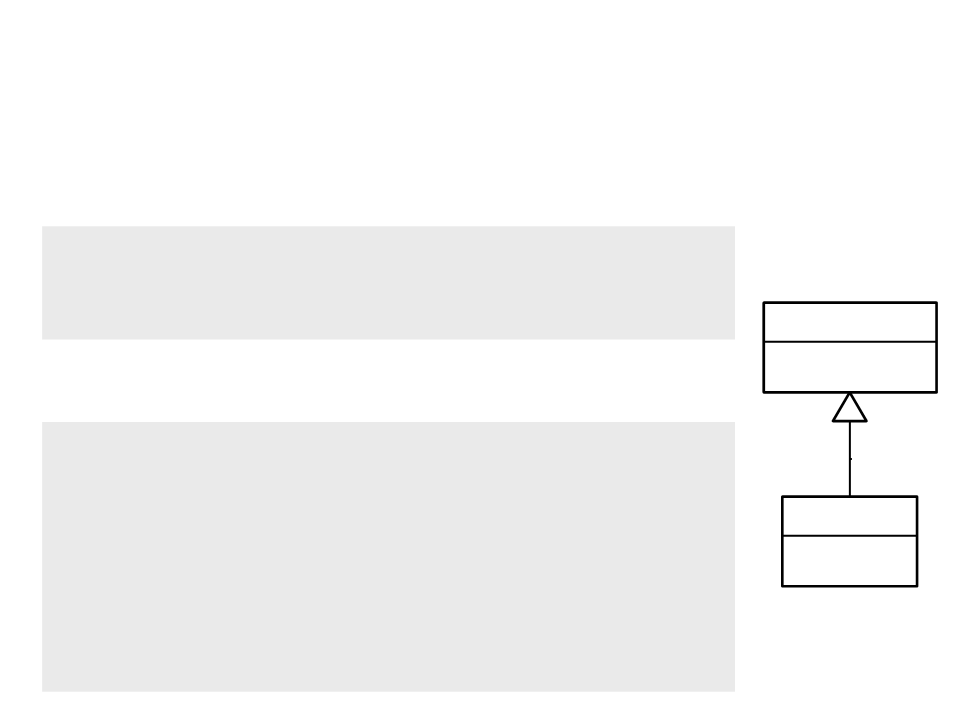
Hierarchical State Machines
•
Solution to reduce the complexity of the finite state machines:
Hierarchical State Machines
–
Rather than combining all the logic into a single state machine, we can
separate it into several state machines arranged in a hierarchy.
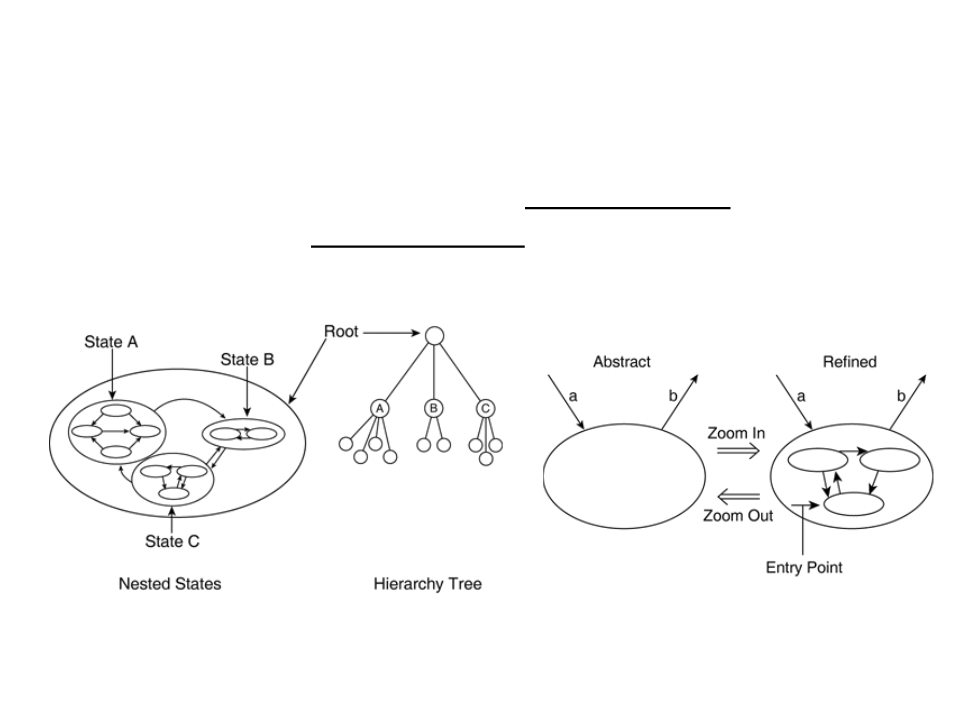
Hierarchical State Machines
•
While high level states represent abstract actions, low level
states represent concrete actions.

Further Reading
•
Buckland, M. (2004). Programming Game AI by Example. Jones & Bartlett
Learning. ISBN: 978-1-55622-078-4.
–
Chapter 2: State-Driven Agent Design
•
•
Millington, I., Funge, J. (2009). Artificial Intelligence for Games (2nd ed.).
CRC Press. ISBN: 978-0123747310.
–
Chapter 5.3: State Machines
Web:
•
https://unity3d.com/pt/learn/tutorials/topics/navigation/