
Artificial Intelligence
Lecture 05 – Behavior Trees
Edirlei Soares de Lima
<edirlei.lima@universidadeeuropeia.pt>
Game AI – Model
•
•
•
•
•
•
•
•
Pathfinding
Steering behaviours
Finite state machines
Automated planning
Behaviour trees
Randomness
Sensor systems
Machine learning

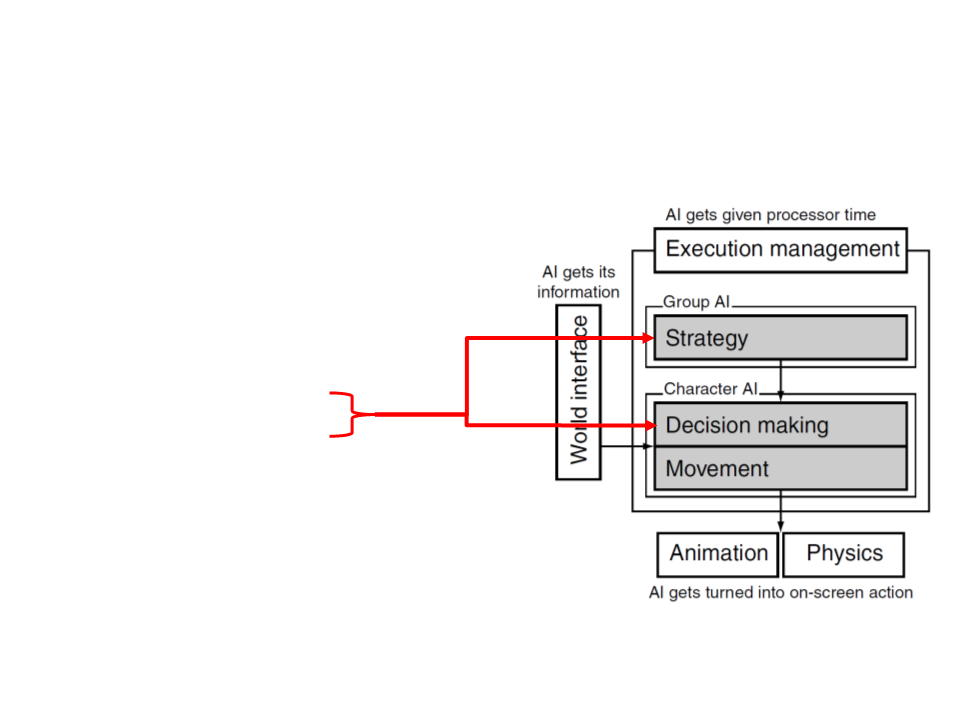
Decision Making
•
•
In game AI, decision making is the ability
of a character/agent to decide what to
do.
The agent processes a set of information
that it uses to generate an action that it
wants to carry out.
–
Input: agent’s knowledge about the world;
–
Output: an action request;
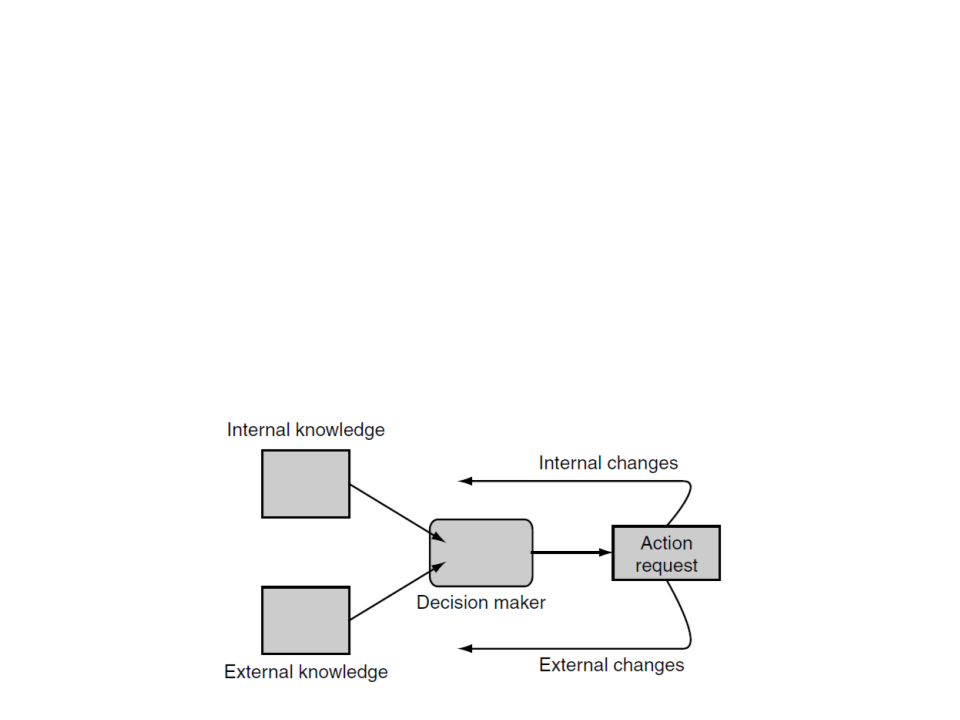
Decision Making
•
The knowledge can be broken down into external and
internal knowledge.
–
External knowledge: information about the game environment (e.g.
characters’ positions, level layout, noise direction).
–
Internal knowledge: information about the character’s internal state
(e.g. health, goals, last actions).
Behavior Tree
•
Behavior trees have a lot in common with Hierarchical State
Machines but, instead of a state, the main building block of a
behavior tree is a task.
–
A task can be something as simple as looking up the value of a variable
in the game state, or executing an animation.
–
Tasks can be decomposed into sub-trees to represent more complex
actions.
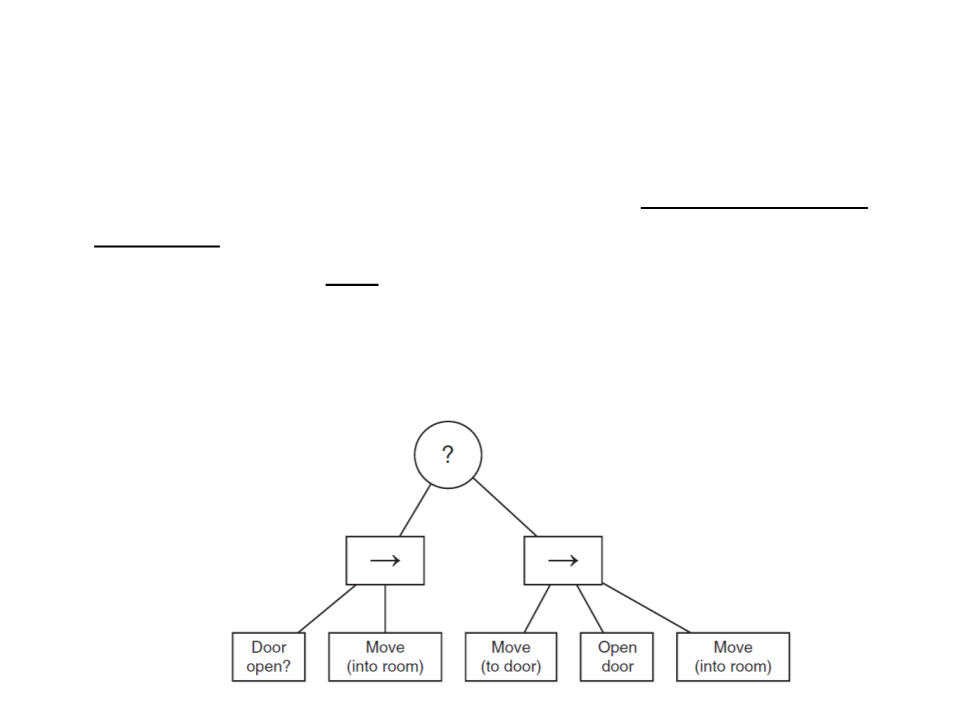
Behavior Tree – Tasks
Selector
•
Behavior trees are composed of three
types of tasks:
–
Conditions: test some property of the game
(e.g. proximity, line of sight, state of the
character).
–
–
Actions: alter the state of the game (e.g.
animation, movement, state change, dialog).
Actions
Sequence
Composites: Selector and Sequence.
•
Selector: returns immediately with a success status
code when one of its children runs successfully.
•
Sequence: returns immediately with a failure status
code when one of its children fails. As long as its
children are succeeding, it will keep going.
Condition Actions
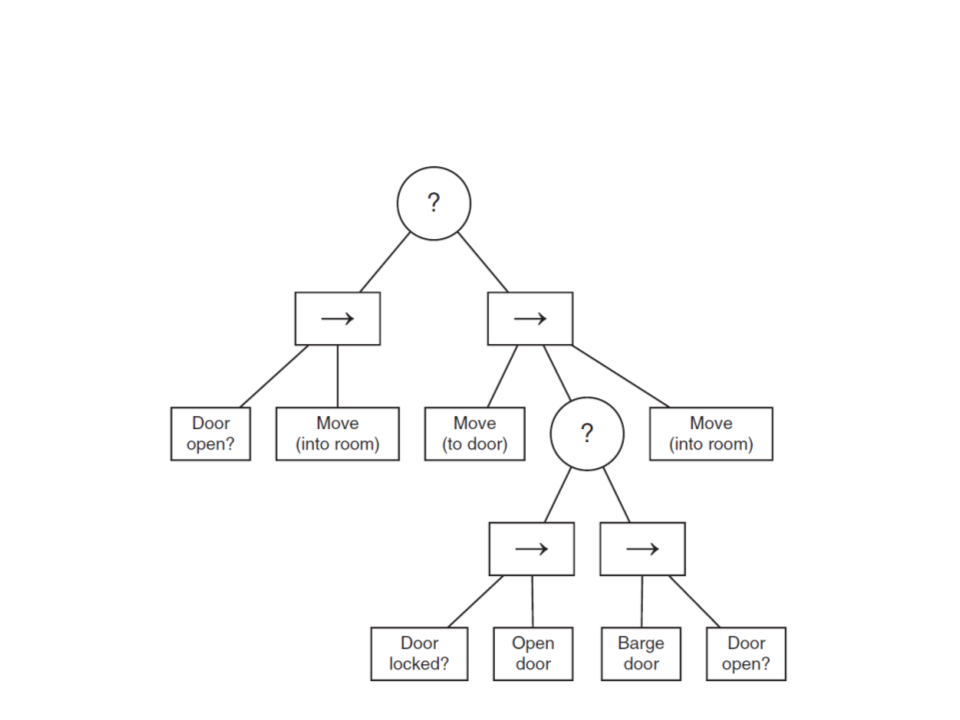
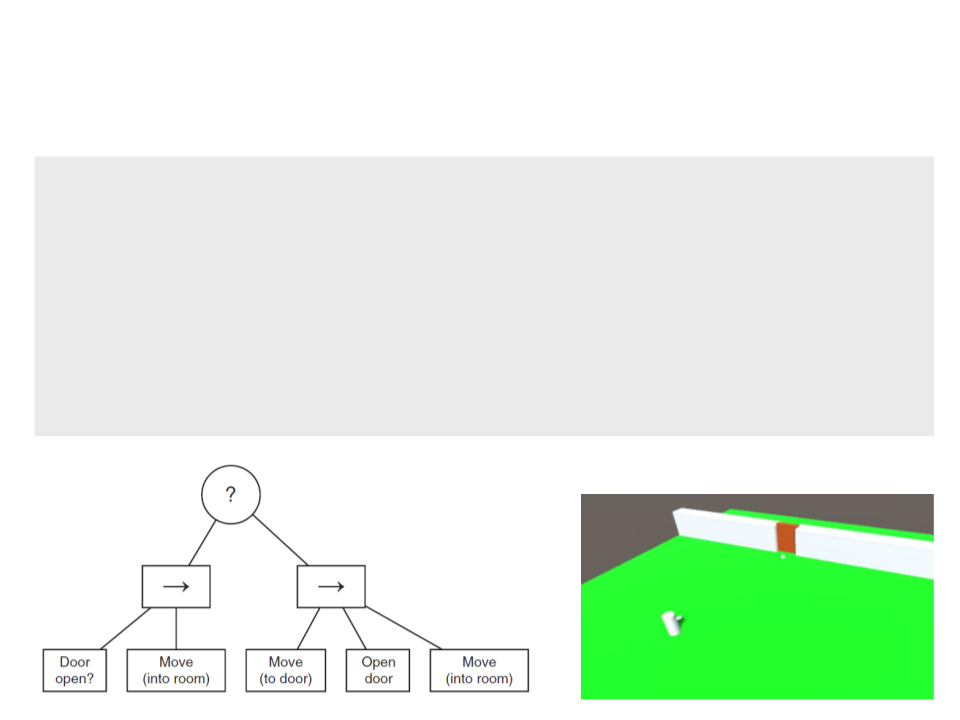
Behavior Tree – Example
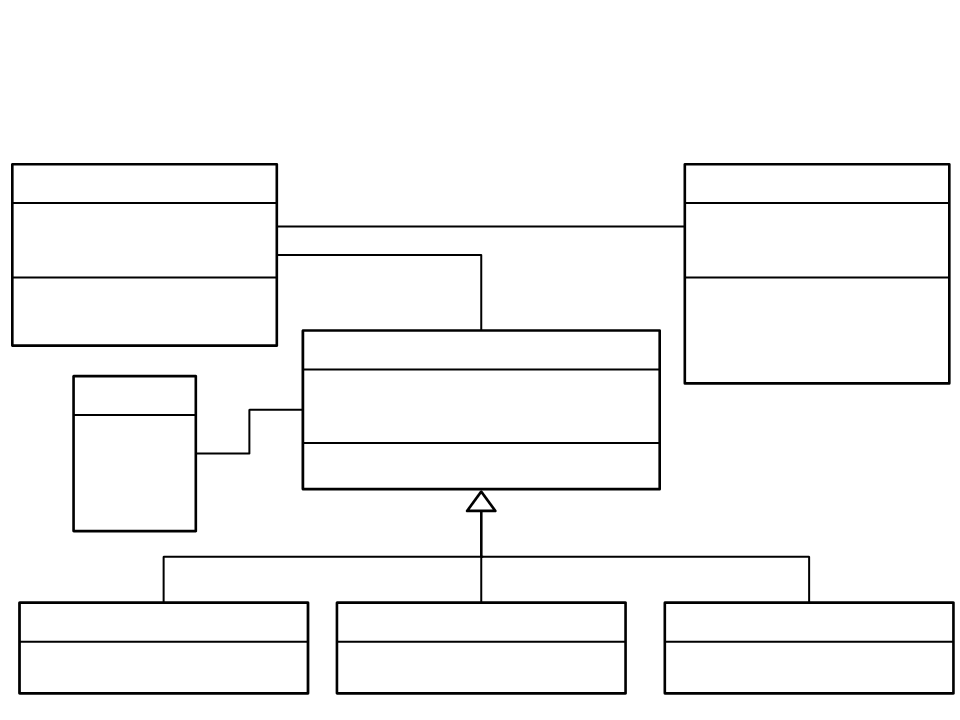
Unity Implementation – Class Diagram
Agent
WorldManager
-
-
behaviorTree: Task;
wordManager: WorldManager;
-doors: DoorInfo[];
-waypoints: WaypointInfo[];
-
-
Start();
Update();
+OpenDoor(name);
+CloseDoor(name);
+
DoorIsOpen(name): bool;
GetWaypoint(name): Vector3;
Task
+
TaskStatus
#
children: Task[];
+status: TaskStatus;
None
Success
Failure
Running
+abstract Run(agent, manager): TaskStatus;
Sequence
Selector
Actions & Conditions
+Run(agent, manager): TaskStatus;
+Run(agent, manager): TaskStatus;
+Run(agent, manager): TaskStatus;
Base Task Class
•
Task Class:
public abstract class Task
{
protected List<Task> children;
public TaskStatus status;
public abstract TaskStatus Run(Agent agent,
WorldManager wordManager);
public Task(){
children = new List<Task>();
status = TaskStatus.None;
}
public void AddChildren(Task task){
children.Add(task);
}
}
Composite Classes
•
Sequence Class:
public class Sequence : Task {
public override TaskStatus Run(Agent agent,
WorldManager wordManager){
int successCount = 0;
foreach (Task task in children){
if (task.status != TaskStatus.Success){
TaskStatus childrenStatus = task.Run(agent, wordManager);
if (childrenStatus == TaskStatus.Failure){
status = TaskStatus.Failure;
return status;
}
else if (childrenStatus == TaskStatus.Success){
successCount++;
}
.
..
Composite Classes
.
..
else{
break;
}
}
else{
successCount++;
}
}
if (successCount == children.Count)
status = TaskStatus.Success;
else
status = TaskStatus.Running;
return status;
}
}
Composite Classes
•
Selector Class:
public class Selector : Task {
public override TaskStatus Run(Agent agent,
WorldManager wordManager){
int failureCount = 0;
foreach (Task task in children){
if (task.status != TaskStatus.Failure){
TaskStatus childrenStatus = task.Run(agent, wordManager);
if (childrenStatus == TaskStatus.Success){
status = TaskStatus.Success;
return status;
}
else if (childrenStatus == TaskStatus.Failure){
failureCount++;
}
.
..
Composite Classes
.
..
else{
break;
}
}
}
if (failureCount == children.Count)
status = TaskStatus.Failure;
else
status = TaskStatus.Running;
return status;
}
}
Condition Classes
•
DoorOpenCondition Class:
public class DoorOpenCondition : Task {
private string doorName;
public DoorOpenCondition(string door){
doorName = door;
}
public override TaskStatus Run(Agent agent,
WorldManager wordManager){
if (wordManager.DoorIsOpen(doorName)){
status = TaskStatus.Success;
}
else{
status = TaskStatus.Failure;
}
return status;
}
}
Action Classes
MoveAction Class:
•
public class MoveAction : Task{
private string destionation;
public MoveAction(string dest){
destionation = dest;
}
public override TaskStatus Run(Agent agent,
WorldManager wordManager){
NavMeshAgent navMeshAgent = agent.GetComponent<NavMeshAgent>();
Vector3 dest = wordManager.GetWaypoint(destionation).position;
if (status == TaskStatus.None){
navMeshAgent.destination = dest;
status = TaskStatus.Running;
}
else if (IsAtDestionation(navMeshAgent)){
status = TaskStatus.Success;
}
return status;
}
Action Classes
.
..
private bool IsAtDestionation(NavMeshAgent navMeshAgent){
if (!navMeshAgent.pathPending){
if (navMeshAgent.remainingDistance <=
navMeshAgent.stoppingDistance){
if (!navMeshAgent.hasPath ||
navMeshAgent.velocity.sqrMagnitude == 0f){
return true;
}
}
}
return false;
}
}
Action Classes
OpenDoorAction Class:
•
public class OpenDoorAction : Task{
private string doorName;
public OpenDoorAction(string door){
doorName = door;
}
public override TaskStatus Run(Agent agent,
GameWorldManager wordManager){
if (!wordManager.DoorIsOpen(doorName)){
wordManager.OpenDoor(doorName);
}
status = TaskStatus.Success;
return status;
}
}
World Manager Class
public class WorldManager : MonoBehaviour {
[SerializeField] private DoorInfo[] doors;
[SerializeField] private WaypointInfo[] waypoints;
public void OpenDoor(string doorName){
for (int x = 0; x < doors.Length; x++){
if (doors[x].name == doorName){
doors[x].transform.Translate(Vector3.right * 2f);
doors[x].open = true;
break;
}
}
}
public void CloseDoor(string doorName){
for (int x = 0; x < doors.Length; x++){
if (doors[x].name == doorName){
doors[x].transform.Translate(Vector3.left * 2f);
doors[x].open = false;
break;
}
}
}
World Manager Class
.
..
public bool DoorIsOpen(string doorName){
for (int x = 0; x < doors.Length; x++){
if (doors[x].name == doorName){
return doors[x].open;
}
}
return false;
}
public Transform GetWaypoint(string name){
foreach (WpInfo wp in waypoints){
if (wp.name == name)
return wp.transform;
}
return null;
}
}
Agent Class
public class Agent : MonoBehaviour
{
[SerializeField] private WorldManager wordManager;
private Task behaviorTree;
private TaskStatus behaviorTreeStatus = TaskStatus.None;
void Start(){
Task sequenceMoveToRoom = new Sequence();
sequenceMoveToRoom.AddChildren(new DoorOpenCondition("Door1"));
sequenceMoveToRoom.AddChildren(new MoveAction("Room1"));
Task sequenceOpenDoorMoveToRoom = new Sequence();
sequenceOpenDoorMoveToRoom.AddChildren(new MoveAction("Door1"));
sequenceOpenDoorMoveToRoom.AddChildren(new OpenDoorAction("Door1"));
sequenceOpenDoorMoveToRoom.AddChildren(new MoveAction("Room1"));
behaviorTree = new Selector();
behaviorTree.AddChildren(sequenceMoveToRoom);
behaviorTree.AddChildren(sequenceOpenDoorMoveToRoom);
}
Agent Class
.
..
void Update(){
if ((behaviorTreeStatus == TaskStatus.None) ||
behaviorTreeStatus == TaskStatus.Running)){
behaviorTreeStatus = behaviorTree.Run(this, wordManager);
(
}
}
}
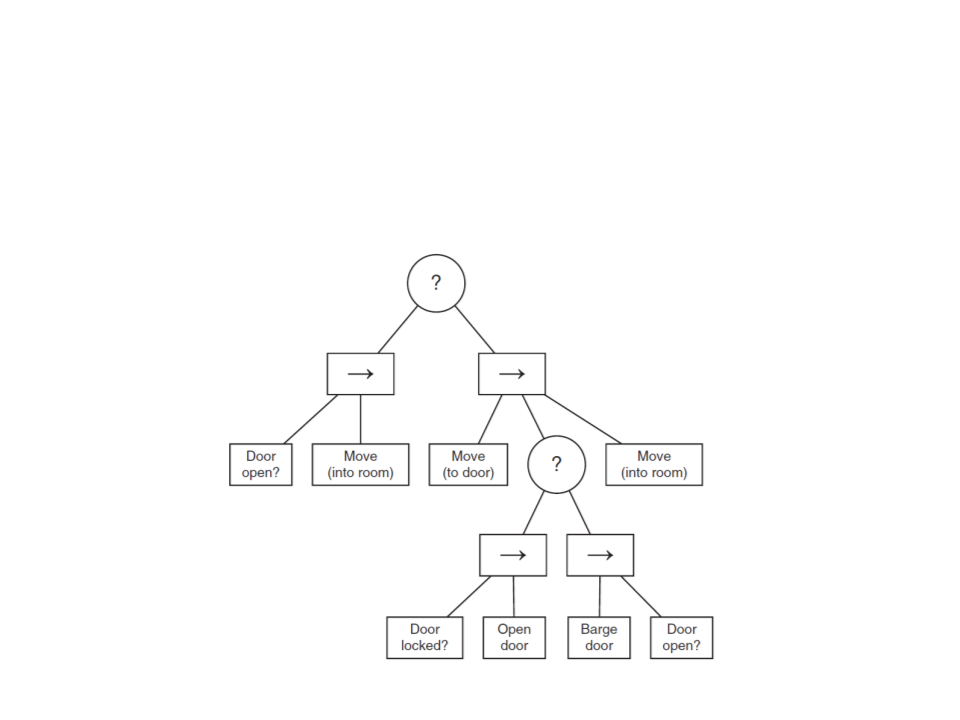
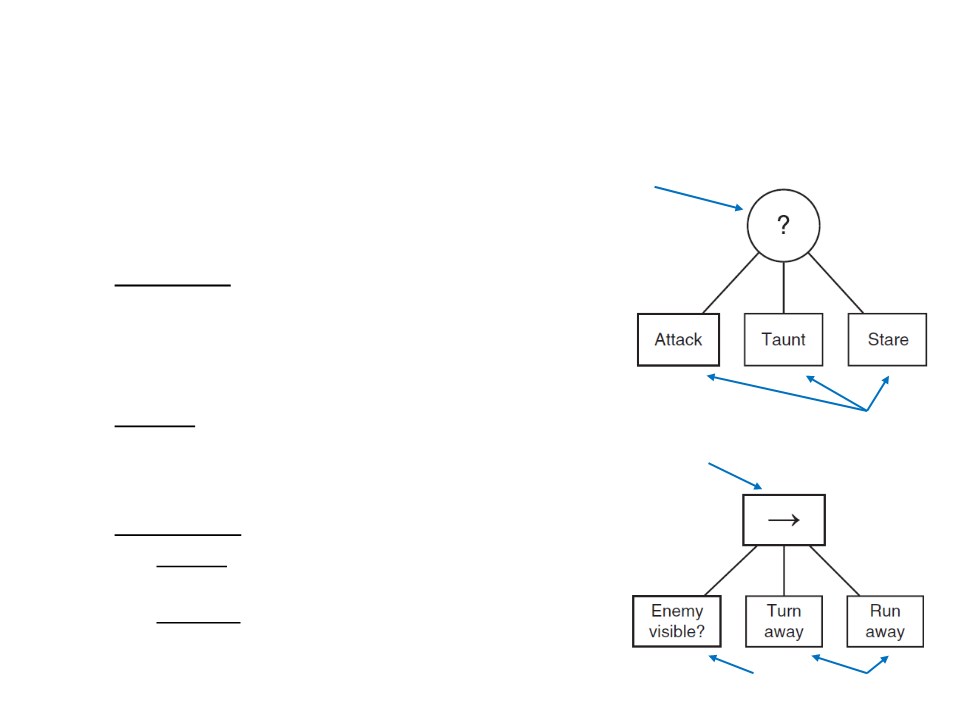
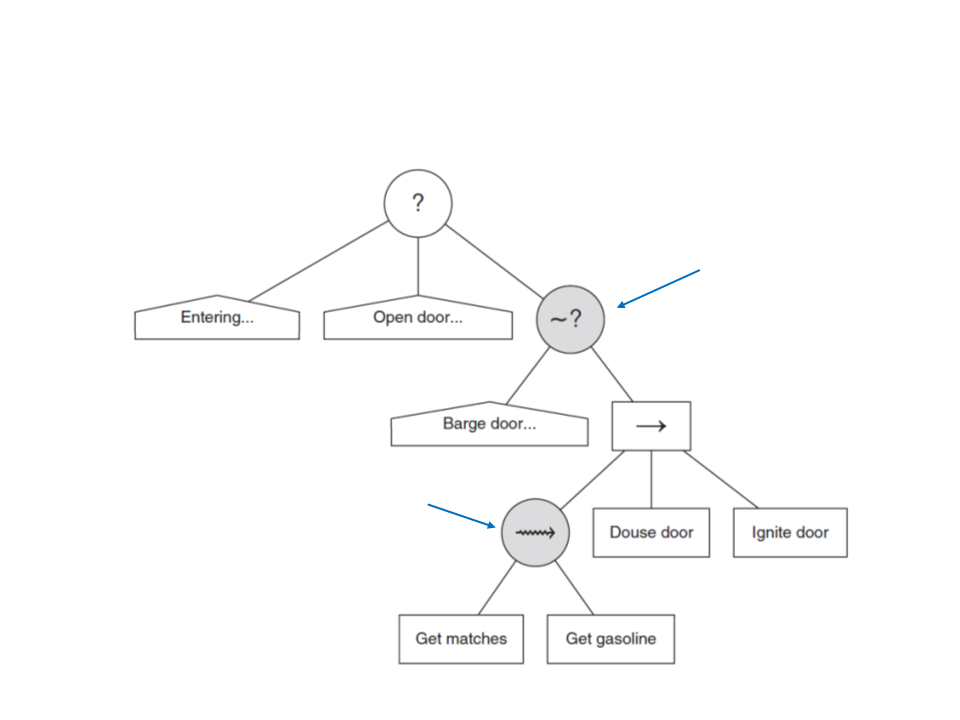
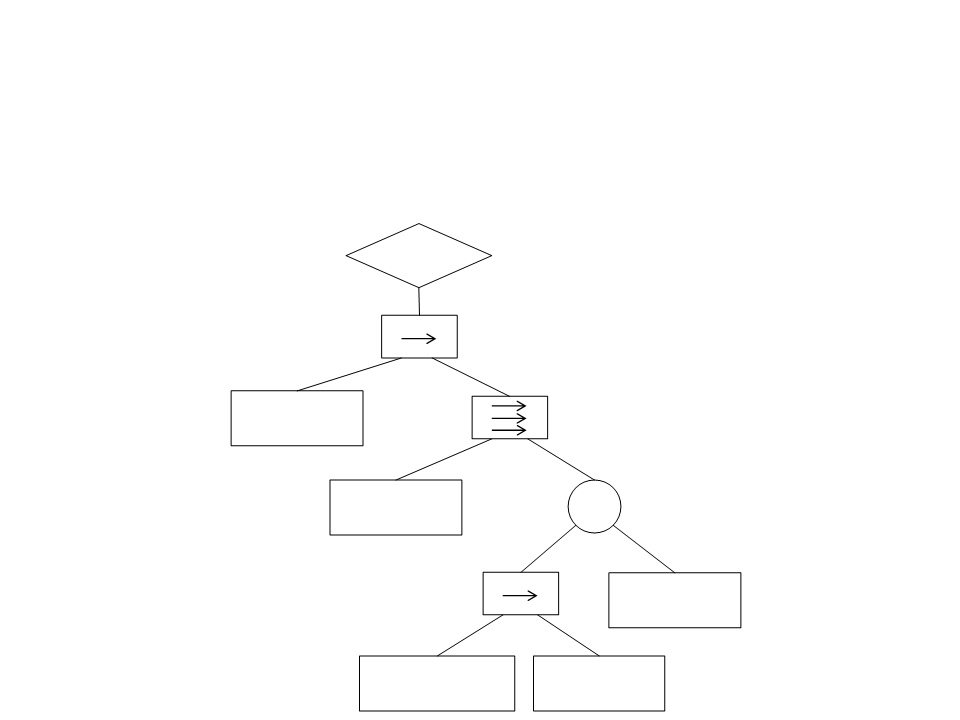
Exercise 1
1) Implement and test the following behavior tree:
Non-Deterministic Composite Tasks
•
Sometimes the order in which tasks are executed is extremely
important. But there are some tasks that don’t need to be
executed in a particular order.
–
Executing tasks in same order can lead to predictable AI who always
try the same things.
–
–
Example (sequence): get matches and gasoline to burn the door.
Example (selector): invade the room through the door or through the
window.
•
Non-deterministic composites can be implemented by
shuffling the order of the children nodes before iterating
through them.
Non-Deterministic Composite Tasks
Non-Deterministic Selector
Non-Deterministic Sequence
Non-Deterministic Composite Tasks
•
NonDeterministicSequence Class:
public class NonDeterministicSequence : Task {
private bool shuffledOrder;
public NonDeterministicSequence()
{
shuffledOrder = false;
}
public override TaskStatus Run(Agent agent,
WorldManager wordManager){
if (!shuffledOrder){
Shuffle(children);
shuffledOrder = true;
}
.
..
}
}
Non-Deterministic Composite Tasks
•
Simple Shuffle method:
public void Shuffle(List<Task> list)
{
int n = list.Count;
while (n > 1)
{
int k = Random.Range(0, n);
Task value = list[k];
list[k] = list[n];
list[n] = value;
n--;
}
}
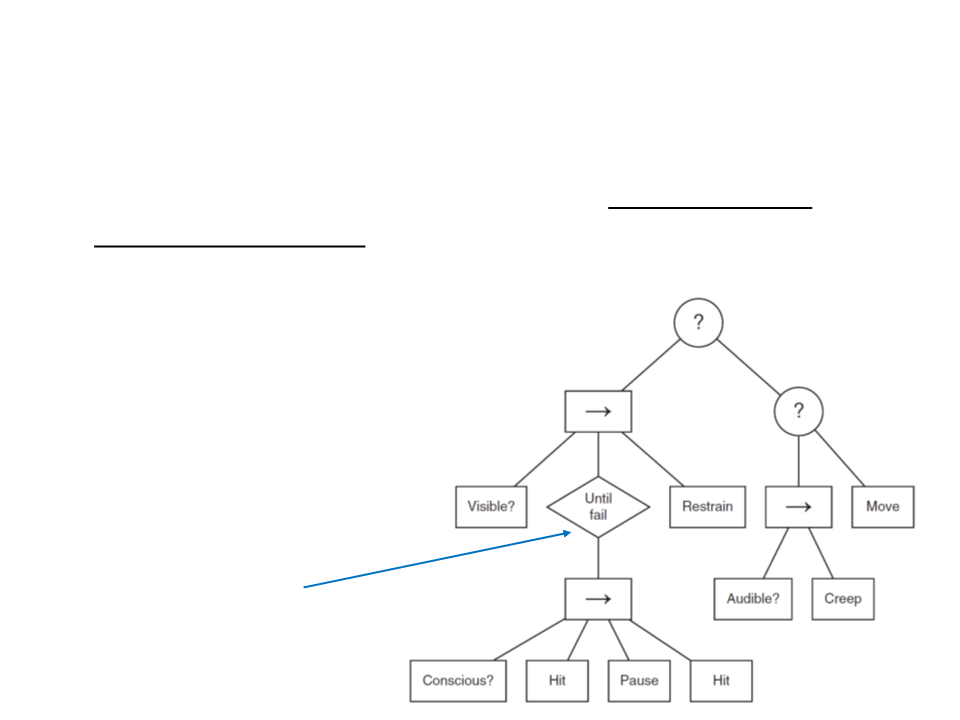
Decorators
•
•
Decorator is a type of task that has one single child task and
modifies its behavior in some way.
Examples:
–
Limit the number of times a task can be run;
–
Keep a task running until it fails;
Decorator
Decorator Classes
•
Decorator Class:
public abstract class Decorator : Task {
protected Task child;
new public void AddChildren(Task task)
{
child = task;
}
}
•
UntilFailDecorator Class:
public class UntilFailDecorator : Decorator{
public override TaskStatus Run(Agent agent,
WorldManager wordManager){
if (status == TaskStatus.None)
status = TaskStatus.Running;
if (child.Run(agent, wordManager) == TaskStatus.Failure)
status = TaskStatus.Success;
return status;
}
}
Parallel Tasks
•
•
When parallel actions are necessary, we can add a third type
of composite tasks to the behavior tree: Parallel.
Rather than running all children tasks one at a time, it runs
them all simultaneously.
–
Example: a character rolling into cover at the same time as shouting an
insult and changing primary weapon.
•
The Parallel task acts in a similar way to the Sequence task. It
has a set of child tasks, and it runs them simultaneously until
one of them fails.
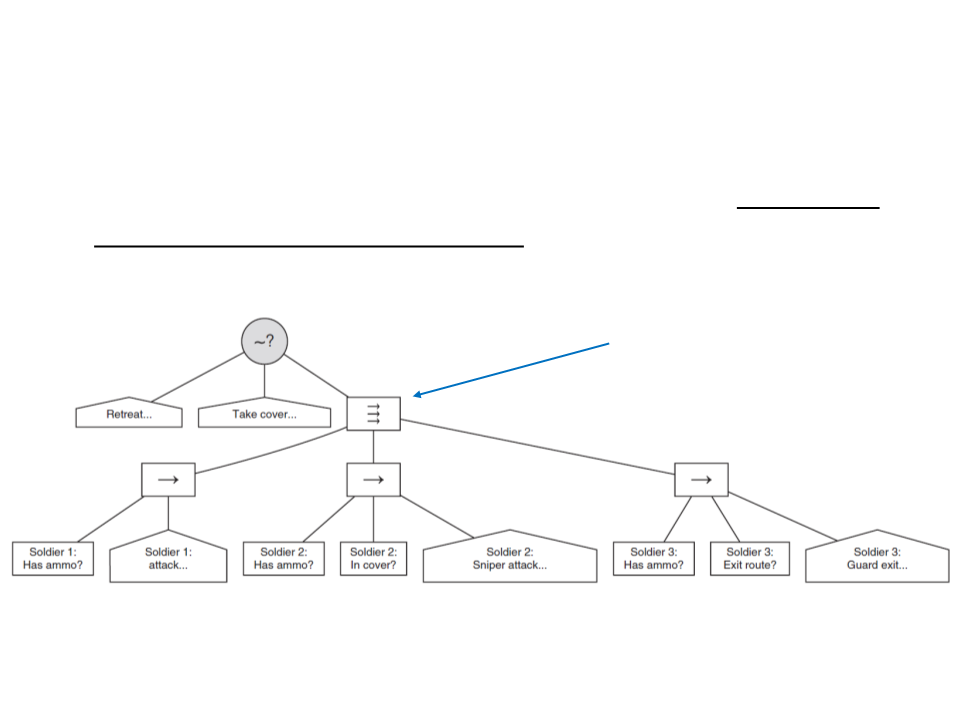
Parallel Tasks
•
At a higher level, we can also use Parallel tasks to control the
behavior of a group of characters.
Parallel
Parallel Class
public class Parallel : Task {
public override TaskStatus Run(Agent agent, WorldManager wordManager){
int successCount = 0;
foreach (Task task in children){
if (task.status != TaskStatus.Success){
TaskStatus childrenStatus = task.Run(agent, wordManager);
if (childrenStatus == TaskStatus.Failure){
status = TaskStatus.Failure;
return status;
}
else if (childrenStatus == TaskStatus.Success)
successCount++;
}
else
successCount++;
}
if (successCount == children.Count)
status = TaskStatus.Success;
else
status = TaskStatus.Running;
return status;
}
}
Exercise 2
2) Implement and test the following behavior tree:
Repeat
Enemy is
Visible?
Shoot
Enemy
?
Always
Succeed
Is Low on
Ammo?
Reload
Weapon
Further Reading
•
Millington, I., Funge, J. (2009). Artificial Intelligence for Games (2nd ed.).
CRC Press. ISBN: 978-0123747310.
–
Chapter 5.4: Behavior Trees