
Artificial Intelligence
Lecture 04 – Automated Planning
Edirlei Soares de Lima
<edirlei.lima@universidadeeuropeia.pt>
Game AI – Model
•
•
•
•
•
•
•
•
Pathfinding
Steering behaviours
Finite state machines
Automated planning
Behaviour trees
Randomness
Sensor systems
Machine learning

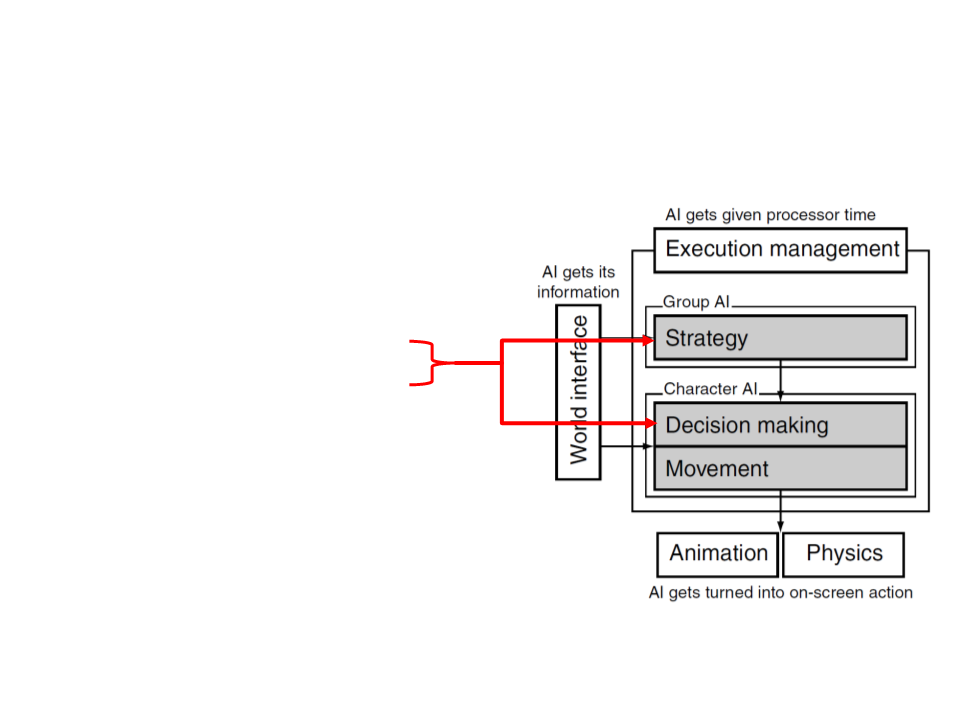
Decision Making
•
•
In game AI, decision making is the ability
of a character/agent to decide what to
do.
The agent processes a set of information
that it uses to generate an action that it
wants to carry out.
–
Input: agent’s knowledge about the world;
–
Output: an action request;
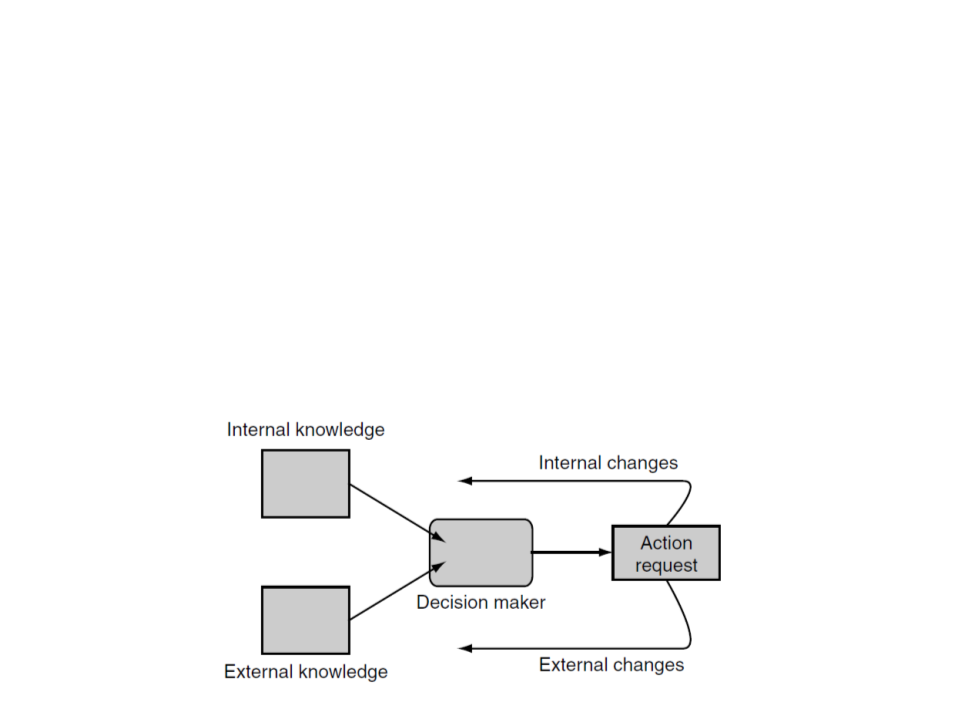
Decision Making
•
The knowledge can be broken down into external and
internal knowledge.
–
External knowledge: information about the game environment (e.g.
characters’ positions, level layout, noise direction).
–
Internal knowledge: information about the character’s internal state
(e.g. health, goals, last actions).

Goal-Oriented Behavior
•
•
So far we have focused on reactive agents: a set of inputs is
provided to the character, and an appropriate action is
selected.
–
Goal-oriented behavior is an alternative approach. It adds character
goals/desires to the decision making process.
To allow an NPC to properly anticipate the effects and take
advantage of sequences of actions, a planning process is
required.
–
Automated Planning Techniques.
Automated Planning
•
•
Planning is the task of finding a sequence of actions (a plan) to
achieve a goal.
Example:
–
Goal: have(sword)Λ at(castle)
–
Plan: go(dungeon), kill(enemy), get(key), go(forest),
open(chest, key), get(sword), go(castle).
•
Plan-based agent process:
1
2
3
) Formulate a goal;
) Find a plan;
) Execute the plan;
Automated Planning
•
•
A planning problem is usually represented through a planning
language, such as the PDDL (Planning Domain Definition
Language).
–
PDDL was derived from the original STRIPS model, which is slightly
more restrictive.
Planning problem elements:
–
–
–
Initial State;
Actions (with preconditions and effects);
Goal;
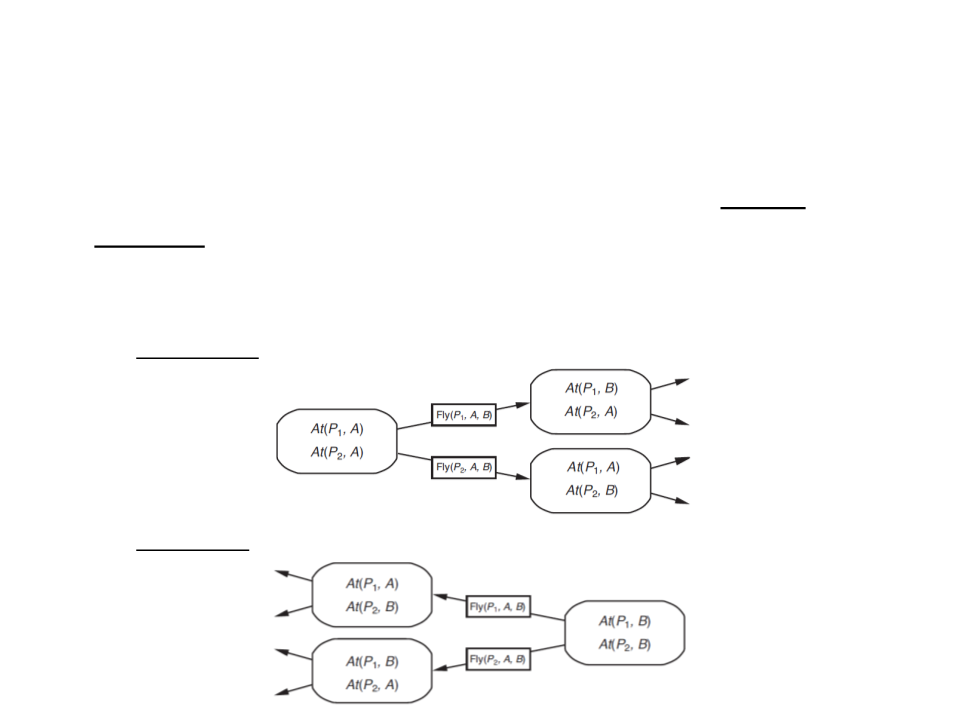
Planning Problem
•
•
Each state is represented as a conjunction of predicates.
–
Example: At(Truck1, Melbourne)∧ At(Truck2, Sydney).
–
Closed-world assumption: any predicates that are not mentioned are
false.
Actions are described by a set of action schemas with
parameters, preconditions, and effects.
–
Example:
Action(
Fly(p, f, t),
PRECOND: At(p, f) ∧ Plane(p) ∧ Airport(f) ∧ Airport(t)
EFFECT: ¬At(p, f) ∧ At(p, t)
)
Planning Problem
•
•
The precondition defines the states in which the action can be
executed.
Example:
Action(
Fly(p, f, t),
PRECOND: At(p, f) ∧ Plane(p) ∧ Airport(f) ∧ Airport(t)
EFFECT: ¬At(p, f) ∧ At(p, t)
)
–
–
Initial State: At(C1, SFO) ∧ At(C2, JFK) ∧ At(P1, SFO) ∧ At(P2, JFK) ∧ Cargo(C1) ∧
Cargo(C2) ∧ Plane(P1) ∧ Plane(P2) ∧ Airport (JFK) ∧ Airport (SFO)
The Fly action can be instantiated as Fly(P1, SFO, JFK) or as Fly(P2, JFK, SFO).
Planning Problem
•
•
The effect defines the result of executing the action.
Example:
Action(
Fly(p, f, t),
PRECOND: At(p, f) ∧ Plane(p) ∧ Airport(f) ∧ Airport(t)
EFFECT: ¬At(p, f) ∧ At(p, t)
)
–
Initial State: At(C1, SFO) ∧ At(C2, JFK) ∧ At(P1, SFO) ∧ At(P2, JFK) ∧ Cargo(C1) ∧
Cargo(C2) ∧ Plane(P1) ∧ Plane(P2) ∧ Airport (JFK) ∧ Airport (SFO)
–
–
Negative predicates are removed from the resulting state (e.g. ¬At(p, f));
Positive predicates are added to the resulting state (e.g. At(p, t));
Example – Air Cargo Transport
Init(At(C1, SFO) ∧ At(C2, JFK) ∧ At(P1, SFO) ∧ At(P2, JFK) ∧
Cargo(C1) ∧ Cargo(C2) ∧ Plane(P1) ∧ Plane(P2) ∧
Airport (JFK) ∧ Airport (SFO))
Goal(At(C1, JFK) ∧ At(C2, SFO))
Action(
Load(c, p, a),
PRECOND: At(c, a) ∧ At(p, a) ∧ Cargo(c) ∧ Plane(p) ∧ Airport(a)
EFFECT: ¬At(c, a) ∧ In(c, p)
)
Action(
Unload(c, p, a),
PRECOND: In(c, p) ∧ At(p, a) ∧ Cargo(c) ∧ Plane(p) ∧ Airport(a)
EFFECT: At(c, a) ∧ ¬In(c, p)
)
Action(
Fly(p, f, t),
PRECOND: At(p, f) ∧ Plane(p) ∧ Airport(f) ∧ Airport(t)
EFFECT: ¬At(p, f) ∧ At(p, t)
)

Example – Blocks World
Init(On(A, Table) ∧ On(B, Table) ∧ On(C, A) ∧
Block(A) ∧ Block(B) ∧ Block(C) ∧ Clear(B) ∧
Clear(C))
Goal(On(A,B) ∧ On(B,C))
Action(
Move(b, x, y),
PRECOND: On(b, x) ∧ Clear(b) ∧ Clear(y) ∧
Block(b) ∧ Block(y) ∧ (b ≠ x) ∧
(
b ≠ y) ∧ (x ≠ y),
EFFECT: On(b, y) ∧ Clear(x) ∧ ¬On(b, x) ∧
Clear(y)
¬
)
Action(
MoveToTable(b, x),
PRECOND: On(b, x) ∧ Clear(b) ∧ Block(b) ∧
(b ≠ x),
EFFECT: On(b, Table) ∧ Clear(x) ∧ ¬On(b, x)
)
Planning Algorithms
•
•
The description of a planning problem defines a search
problem: we can search from the initial state looking for a goal.
Planning approaches:
–
Progressive: forward state-space search;
–
Regressive: backward relevant-states search;
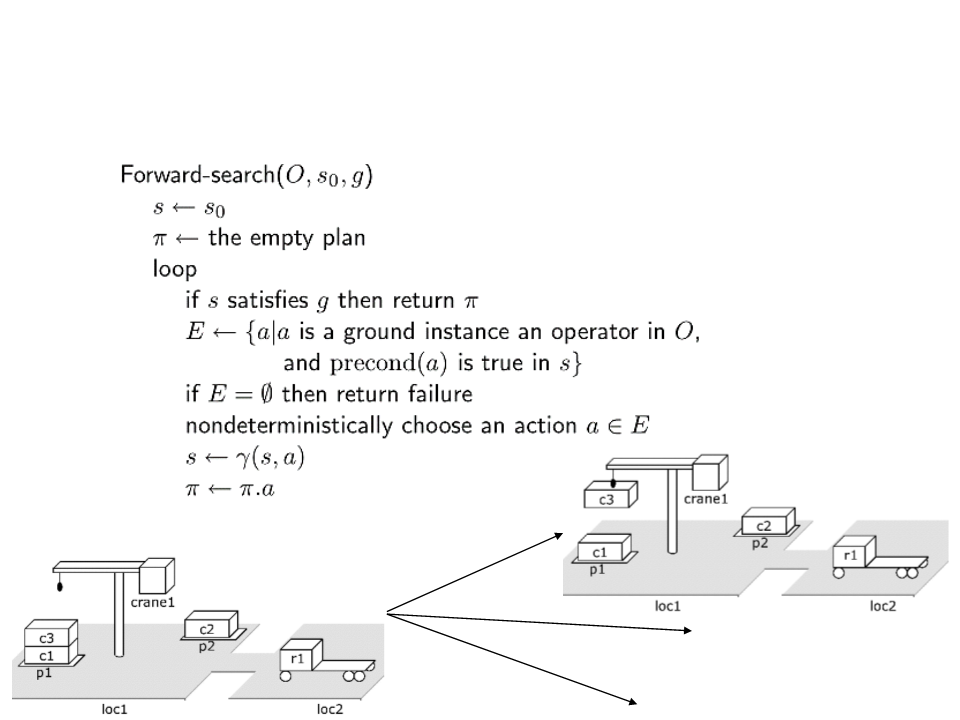
Forward State-Space Search
take c3
…
take c2
move r1
…
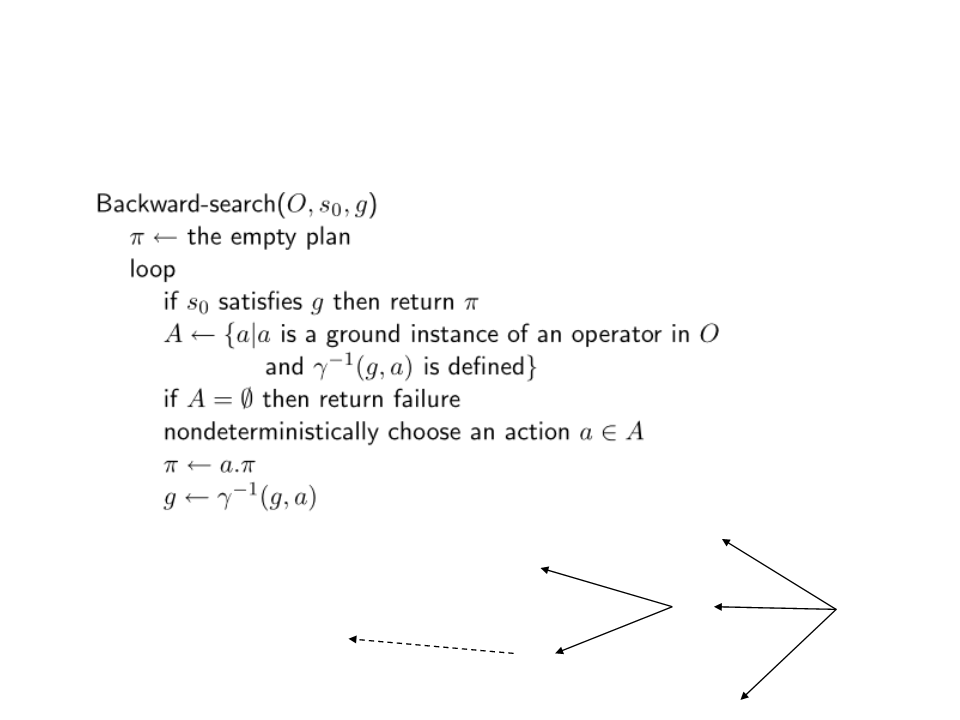
Backward Relevant-States Search
g1
a1
a4
g4
g2
g0
a2
a3
s0
a5
g5
g3
Planning Domain Definition Language
•
•
A planning problem is usually represented through a planning
language, such as the PDDL (Planning Domain Definition
Language).
–
PDDL was derived from the original STRIPS model, which is slightly
more restrictive.
Planning problems specified in PDDL are defined in two files:
–
Domain File: types, predicates, and actions.
–
Problem File: objects, initial state, and goal.
PDDL – Syntax
•
Domain File:
(define (domain <domain name>)
(
(
(
<
<
[
<
:requirements :strips :equality :typing)
:types <list of types>)
:constants <list of constants>)
PDDL code for predicates>
PDDL code for first action>
...]
PDDL code for last action>
)
•
Problem File:
(define (problem <problem name>)
(
<
<
<
:domain <domain name>)
PDDL code for objects>
PDDL code for initial state>
PDDL code for goal specification>
)
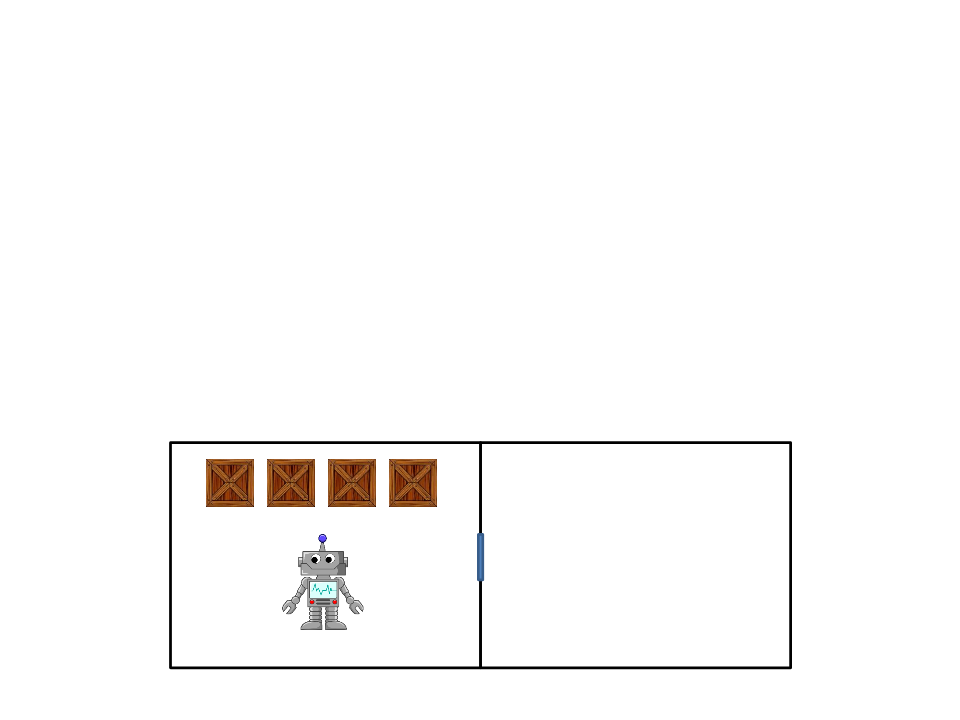
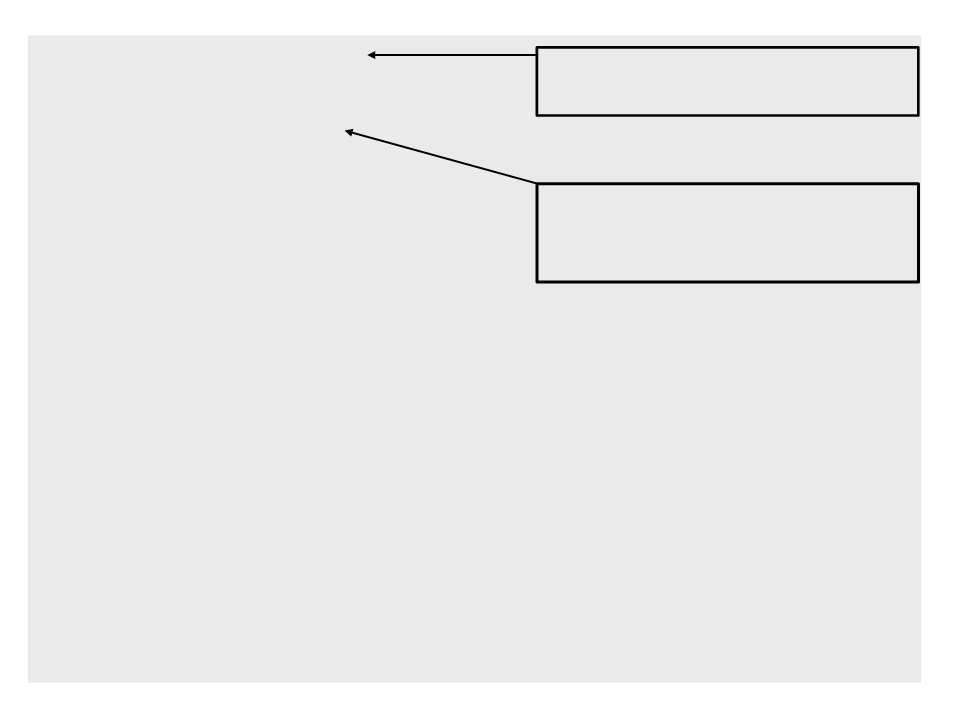
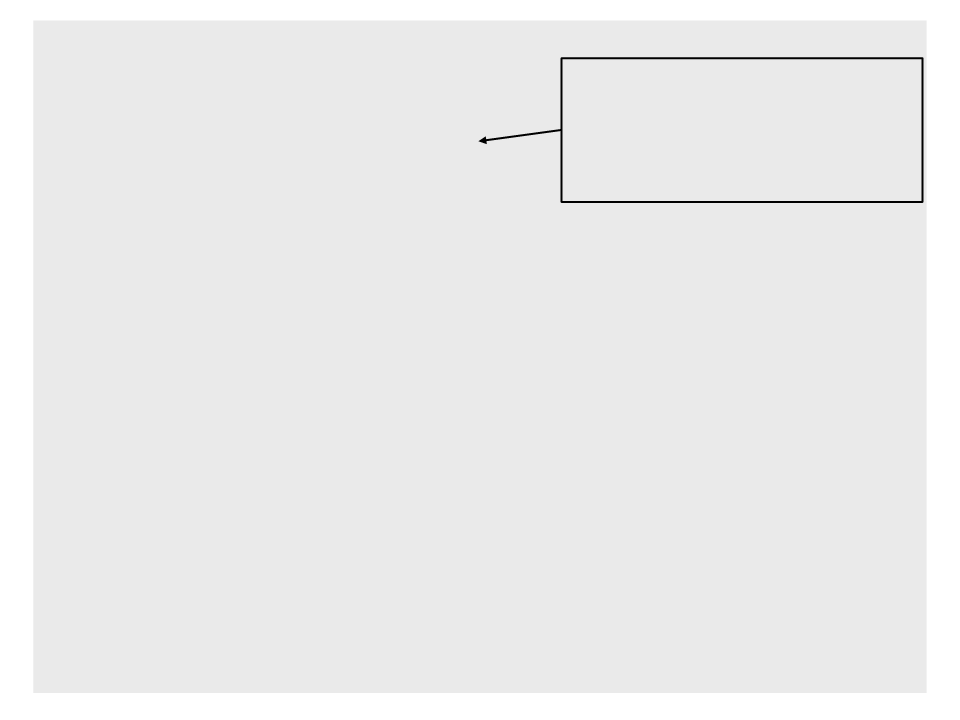
PDDL – Example Problem
•
“There is robot that can move between two rooms
and pickup/putdown boxes with two arms. Initially,
the robot and 4 boxes are at room 1. The robot must
take all boxes to room 2.”
Room 1
Room 2
PDDL – Domain File
•
•
•
Types:
(:types room box arm)
Constants:
(:constants left right - arm)
Predicates:
–
–
–
–
robot-at(x) – true if the robot is at room x;
box-at(x, y) – true if the box x is at room y;
free(x) – true if the arm x is not holding a box;
carry(x, y) – true if the arm x is holding a box y;
(:predicates
(
(
(
(
robot-at ?x - room)
box-at ?x - box ?y - room)
free ?x - arm)
carry ?x – box ?y - arm)
)
PDDL – Domain File
•
•
•
Action: move the robot from room x to room y.
Precondition: robot-at(x) must be true.
Effect: robot-at(y) becomes true and robot-at(x) becomes
false.
(:action move
:
:
:
parameters (?x ?y - room)
precondition (robot-at ?x)
effect (and (robot-at ?y) (not (robot-at ?x)))
)
PDDL – Domain File
•
•
Pickup Action:
(:action pickup
:
:
parameters (?x - box ?y - arm ?w - room)
precondition (and (free ?y) (robot-at ?w)
(
box-at ?x ?w))
effect (and (carry ?x ?y) (not (box-at ?x ?w))
not(free ?y)))
:
(
)
Putdown Action:
(:action putdown
:
:
:
parameters (?x - box ?y -arm ?w - room)
precondition (and (carry ?x ?y) (robot-at ?w))
effect (and (not(carry ?x ?y)) (box-at ?x ?w)
(free ?y))
)
PDDL – Domain File
define (domain robot)
(
(
(
(
(
:requirements :strips :equality :typing)
:types room box arm)
:constants left right - arm)
:predicates
(
(
(
(
robot-at ?x - room)
box-at ?x - box ?y - room)
free ?x - arm)
carry ?x - box ?y - arm)
)
(
:action move
:
:
:
parameters (?x ?y - room)
precondition (robot-at ?x)
effect (and (robot-at ?y) (not (robot-at ?x)))
)
(
:action pickup
:
:
:
parameters (?x - box ?y - arm ?w - room)
precondition (and (free ?y) (robot-at ?w) (box-at ?x ?w))
effect (and (carry ?x ?y) (not (box-at ?x ?w)) (not(free ?y)))
)
(
:action putdown
:
:
:
parameters (?x - box ?y -arm ?w - room)
precondition (and (carry ?x ?y) (robot-at ?w))
effect (and (not(carry ?x ?y)) (box-at ?x ?w) (free ?y))
)
)
PDDL – Problem File
•
•
Objects: rooms, boxes, and arms.
(:objects
room1 room2 - room
box1 box2 box3 box4 - box
left right - arm
)
Initial State: the robot and all boxes are at room 1.
(:init
(
(
(
(
(
(
(
robot-at room1)
box-at box1 room1)
box-at box2 room1)
box-at box3 room1)
box-at box4 room1)
free left)
free right)
)
PDDL – Problem File
•
Goal: all boxes must be at room 2.
(:goal
(
and (box-at box1 room2)
(box-at box2 room2)
(box-at box3 room2)
(box-at box4 room2)
)
)
PDDL – Problem File
(
(
define (problem robot1)
:domain robot)
(:objects
room1 room2 - room
box1 box2 box3 box4 - box
left right - arm
)
(
:init
(
(
(
(
(
(
(
robot-at room1)
box-at box1 room1)
box-at box2 room1)
box-at box3 room1)
box-at box4 room1)
free left)
free right)
)
(
:goal
(
and
(
(
(
(
box-at box1 room2)
box-at box2 room2)
box-at box3 room2)
box-at box4 room2)
)
)
)
PDDL – Planners
•
•
HSP Planner - https://github.com/bonetblai/hsp-planners
–
Heuristic Search Planner;
–
Compiled version for windows (cygwin):
http://edirlei.3dgb.com.br/aulas/ia_2013_1/HSP-Planner.zip
Online PDDL Planner:
–
Editor: http://editor.planning.domains/
–
Remote API: http://solver.planning.domains/

HSP Planner
•
•
Executing the planner:
–
hsp.exe robot-problem.pddl robot-domain.pddl
Extra parameters:
–
Search direction: -d backward ou forward
–
Search algorithm: -a bfs ou gbfs

HSP Planner
•
Forward search:
• Backward search:
(
(
(
(
(
(
(
(
(
(
(
(
(
PICKUP BOX1 LEFT ROOM1)
MOVE ROOM1 ROOM2)
PUTDOWN BOX1 LEFT ROOM2)
MOVE ROOM2 ROOM1)
PICKUP BOX2 LEFT ROOM1)
MOVE ROOM1 ROOM2)
PUTDOWN BOX2 LEFT ROOM2)
MOVE ROOM2 ROOM1)
PICKUP BOX3 LEFT ROOM1)
PICKUP BOX4 RIGHT ROOM1)
MOVE ROOM1 ROOM2)
(PICKUP BOX4 RIGHT ROOM1)
(PICKUP BOX3 LEFT ROOM1)
(MOVE ROOM1 ROOM2)
(PUTDOWN BOX4 RIGHT ROOM2)
(PUTDOWN BOX3 LEFT ROOM2)
(MOVE ROOM2 ROOM1)
(PICKUP BOX2 RIGHT ROOM1)
(PICKUP BOX1 LEFT ROOM1)
(MOVE ROOM1 ROOM2)
(PUTDOWN BOX2 RIGHT ROOM2)
(PUTDOWN BOX1 LEFT ROOM2)
PUTDOWN BOX3 LEFT ROOM2)
PUTDOWN BOX4 RIGHT ROOM2)
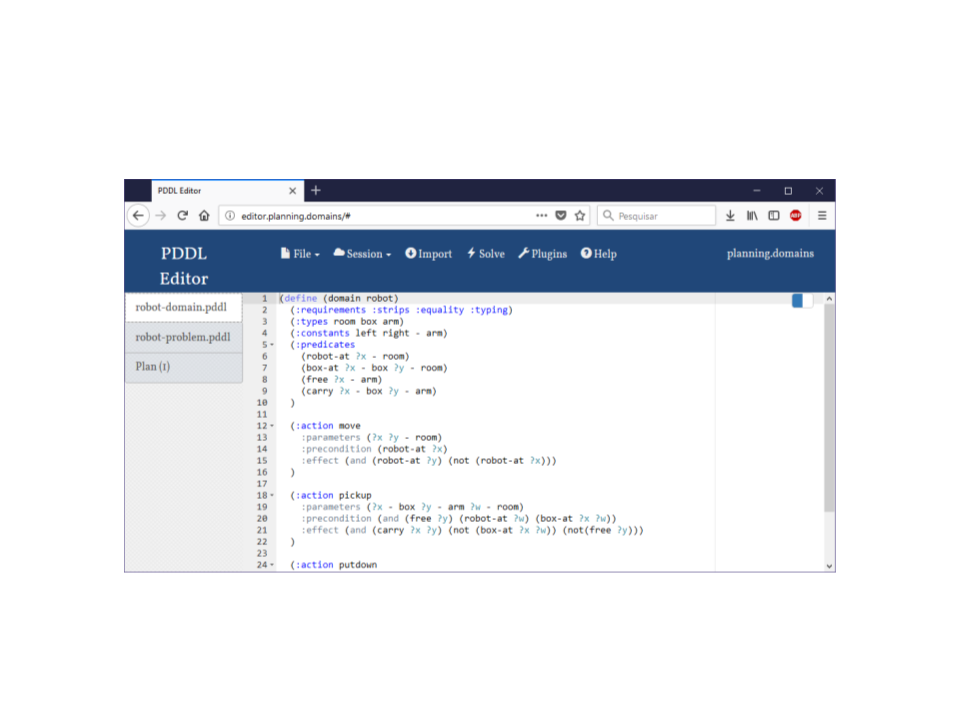
Online PDDL Planner

Online PDDL Planner
•
Resulting plan:
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
pickup box1 left room1)
move room1 room2)
putdown box1 left room2)
move room2 room1)
pickup box2 left room1)
move room1 room2)
putdown box2 left room2)
move room2 room1)
pickup box3 left room1)
move room1 room2)
putdown box3 left room2)
move room2 room1)
pickup box4 left room1)
move room1 room2)
putdown box4 left room2)
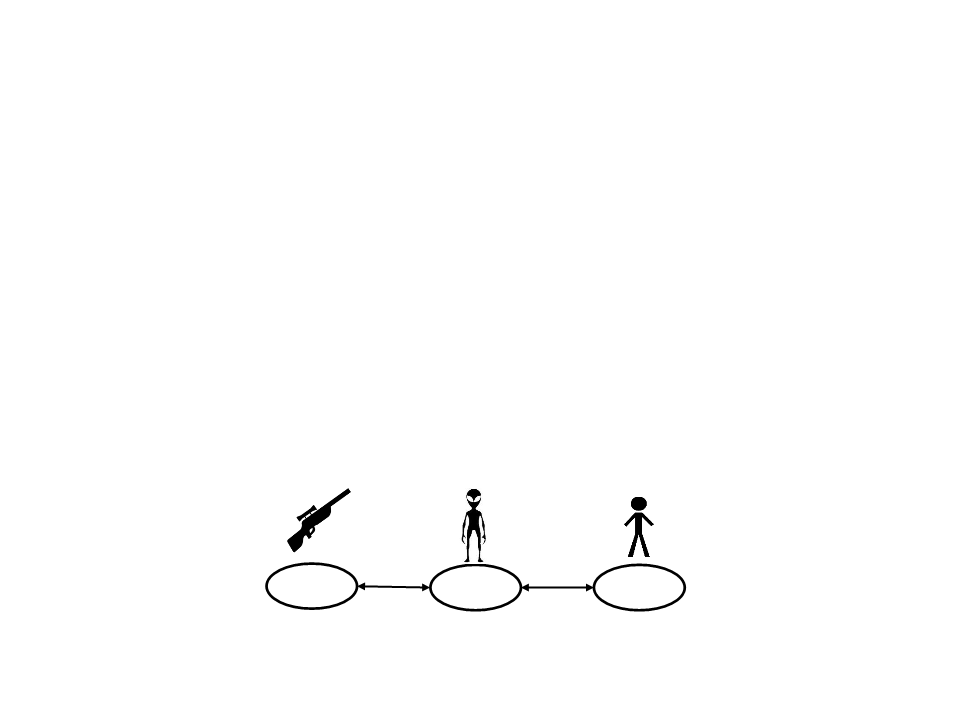
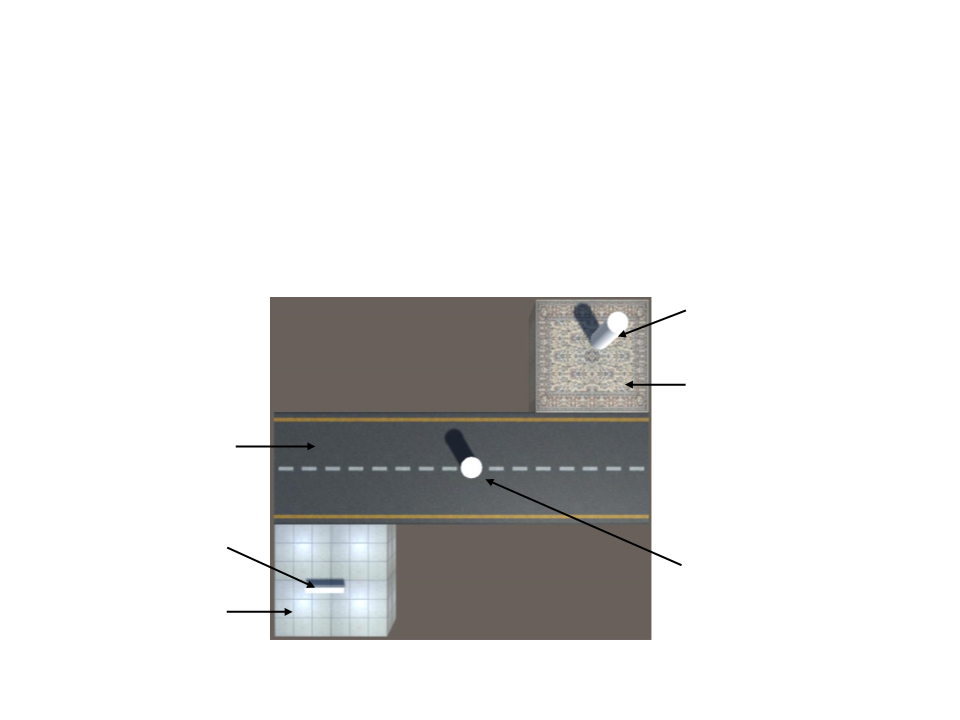
PDDL – Simple Game Situation
•
“The objective of the NPC is to kill the player, but he can't do
much without a weapon.”
–
–
–
–
The game world comprises three places: store, street and a house;
There is a gun at the store;
The NPC is at the street;
The player is at the house;
Gun
NPC
Player
House
Store
Street
PDDL – Simple Game Situation
(define (domain simplegame)
(:requirements :strips :equality :typing)
(:types location character enemy weapon)
(:predicates
(
(
(
(
at ?c ?l)
path ?l1 ?l2)
has ?c ?w)
dead ?c)
)
(:action go
:
:
:
parameters (?c - character ?l1 - location ?l2 - location)
precondition (and (at ?c ?l1) (path ?l1 ?l2))
effect (and (at ?c ?l2) (not (at ?c ?l1)))
)
(:action get
:
:
:
parameters (?c - character ?w - weapon ?l - location)
precondition (and (at ?c ?l) (at ?w ?l))
effect (and (has ?c ?w) (not (at ?w ?l)))
)
(:action kill
:
:
:
parameters (?c - character ?e - enemy ?w - weapon ?l - location)
precondition (and (at ?c ?l) (at ?e ?l) (has ?c ?w))
effect (and (dead ?e) (not(at ?e ?l)))
)
)
PDDL – Simple Game Situation
(
(
define (problem npc1)
:domain simplegame)
(
:objects
store street house - location
npc - character
player - enemy
gun - weapon
)
(
:init
(
(
(
(
(
(
(
at npc street)
at player house)
at gun store)
path store street)
path street store)
path street house)
path house street)
)
(
:goal
(
and
(
dead player)
)
)
)
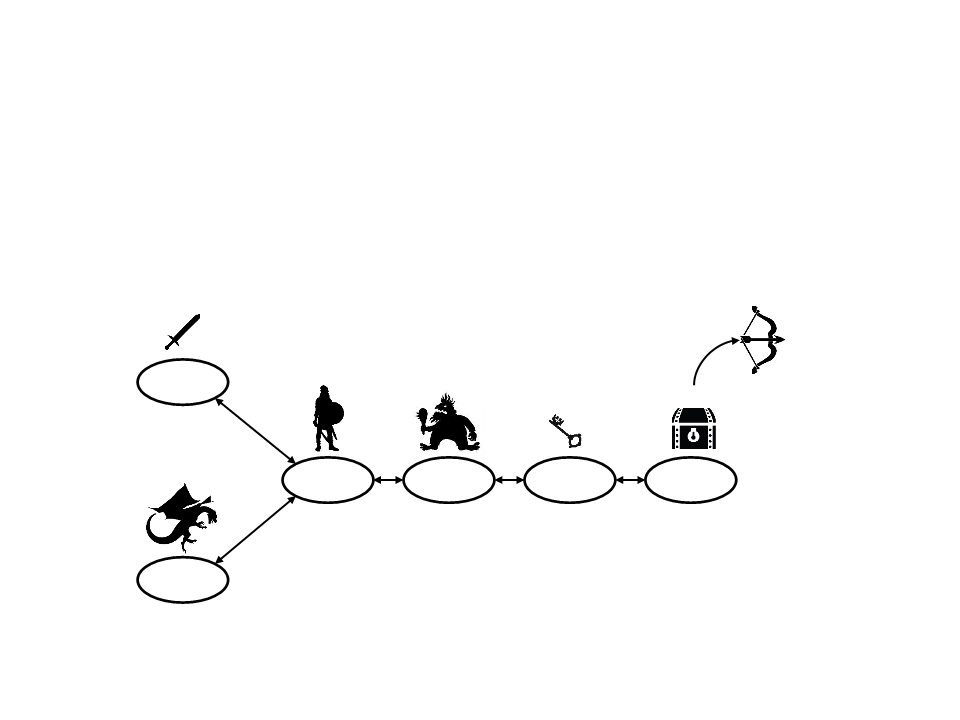
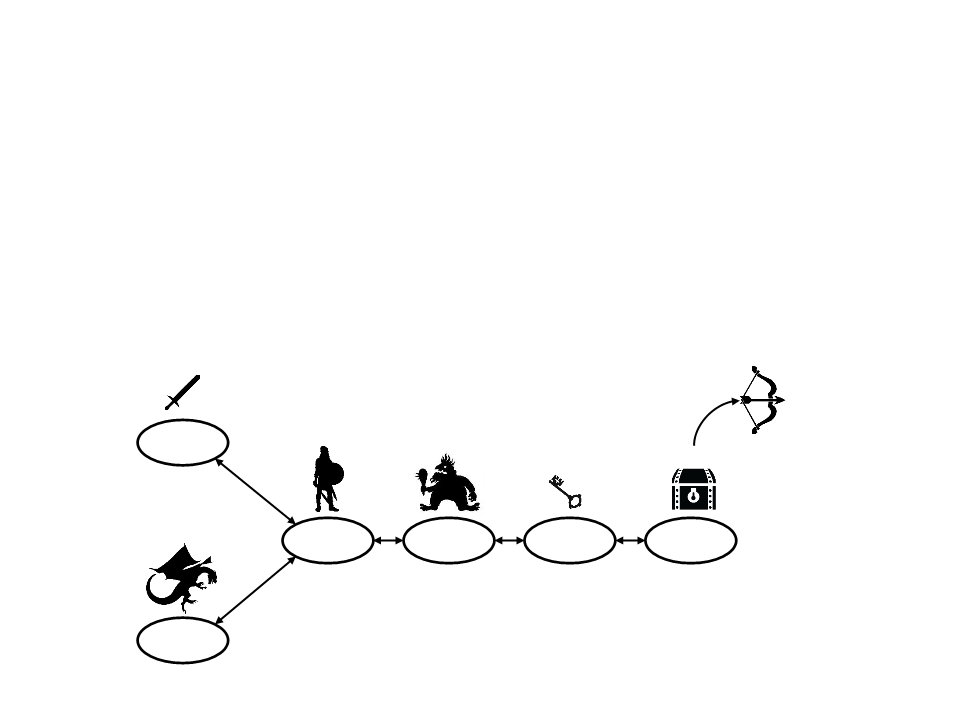
Exercise 1
1
) Implement the PDDL domain and problem files to solve the following
problem: “A giant dragon is attacking the castle and John must find a
way to kill the dragon!”
strong weapon (magic bow)
weak weapon (sword)
inside
John
weak troll
Store
chest key
River
chest
strong dragon
Castle
Town
Forest
Cave
Additional information:
•
•
•
•
•
John can not leave a location if there is a alive enemy there;
The weak troll can be killed with the weak weapon (sword);
The chest is closed. It can be opened with the chest key;
There is a strong weapon inside of the chest (magic bow);
The dragon can only be killed with a strong weapon (the magic bow);
Automated Planning in Unity
•
•
The best way to add automated planning to a Unity project is
by implementing the planning algorithm directly in Unity.
–
Starting point: C# PDDL Parser - https://github.com/sunsided/pddl
Alternatively, we can use a modified version of the HSP
Planner (written in C) as a standard alone application that can
be executed by an Unity script to generate plans.
–
http://edirlei.3dgb.com.br/aulas/game-ai/HPS-Planner-Unity.zip
–
Not an efficient solution. Use it only for prototyping purposes.
•
Another option: use the online planning service API:
–
http://solver.planning.domains/
–
Limitations: internet connection, speed, server overload, ...
Automated Planning in Unity
•
Executing the HSP Planner in Unity:
using System.Diagnostics;
..
try{
Process plannerProcess = new Process();
Relative path of the HSP
exe in the project folder.
.
plannerProcess.StartInfo.FileName = "Planner/hsp2.exe";
plannerProcess.StartInfo.CreateNoWindow = true;
plannerProcess.StartInfo.Arguments = "Planner/game-problem.pddl
Planner/game-domain.pddl";
plannerProcess.StartInfo.UseShellExecute = false;
plannerProcess.StartInfo.RedirectStandardOutput = true;
plannerProcess.Start();
plannerProcess.WaitForExit();
while (!plannerProcess.StandardOutput.EndOfStream){
UnityEngine.Debug.Log(plannerProcess.StandardOutput.ReadLine());
}
}
catch (System.Exception e){
UnityEngine.Debug.Log(e);
Processes the plan actions
individually.
}
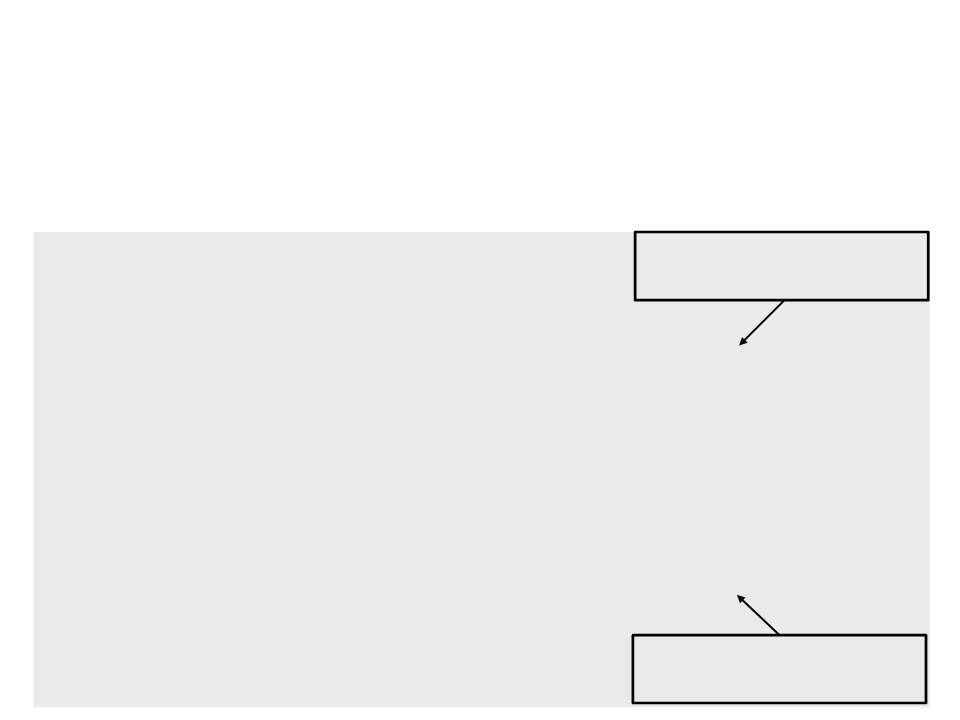
Automated Planning in Unity - Example
•
Simple Game Situation Example: “The objective of the NPC is
to kill the player, but he can't do much without a weapon.”
Player
House
Street
Gun
NPC
Store
public class PlanAction {
public string name;
public List<string> parameters;
public Status status;
Class to store and interpret planner
actions.
public PlanAction(string action){
string temp = "";
name = "";
parameters = new List<string>();
public enum Status { Ready,
Executing,
Completed
}
;
foreach (char c in action){
if (c == ' '){
if (name.Equals(""))
name = temp;
else
parameters.Add(temp);
temp = "";
}
else if (c == ')')
parameters.Add(temp);
else if (c != '(')
temp += c;
}
status = Status.Ready;
}
}
public class NPCPlanner : MonoBehaviour {
private List<PlanAction> plan;
private int currentAction;
private NavMeshAgent agent;
public WaypointInfo[] waypoints;
void Start(){
plan = new List<PlanAction>();
agent = GetComponent<NavMeshAgent>();
currentAction = 0;
[
public struct WaypointInfo
{
System.Serializable]
public string name;
public Transform waypoint;
}
try{
Process planner = new Process();
planner.StartInfo.FileName = "Planner/hsp2.exe";
planner.StartInfo.CreateNoWindow = true;
planner.StartInfo.Arguments = "Planner/game-problem.pddl
Planner/game-domain.pddl";
planner.StartInfo.UseShellExecute = false;
planner.StartInfo.RedirectStandardOutput = true;
planner.Start();
planner.WaitForExit();
while (!planner.StandardOutput.EndOfStream){
plan.Add(new PlanAction(planner.StandardOutput.ReadLine()));
}
}catch (System.Exception e){
UnityEngine.Debug.Log(e);
}
}
void Update(){
if (currentAction < plan.Count){
if (plan[currentAction].status == Status.Ready){
DoAction(plan[currentAction]);
}
if (plan[currentAction].status == Status.Executing){
CheckAction(plan[currentAction]);
}
if (plan[currentAction].status == Status.Completed){
currentAction++;
}
}
Just an example. Usually you
should play an animation.
}
void DoAction(PlanAction action){
if (action.name.Equals("GO")){
agent.destination = GetWaypoint(action.parameters[2]);
action.status = Status.Executing;
}
else if (action.name.Equals("GET")){
Destroy(GameObject.FindGameObjectWithTag(action.parameters[1]));
action.status = Status.Executing;
}
else if (action.name.Equals("KILL")){
Destroy(GameObject.FindGameObjectWithTag(action.parameters[1]));
action.status = Status.Executing;
}
}
void CheckAction(PlanAction action){
if (action.name.Equals("GO")){
if (IsAtDestionation())
action.status = Status.Completed;
}
else if (action.name.Equals("GET")){
action.status = Status.Completed;
Usually you need to wait
until the animation ends.
}
else if (action.name.Equals("KILL")){
action.status = Status.Completed;
}
}
Vector3 GetWaypoint(string name){
foreach (WaypointInfo wp in waypoints){
if (wp.name.Equals(name))
return wp.waypoint.position;
}
return Vector3.zero;
}
public bool IsAtDestionation(){
Same function implemented
in last lecture.
...
}
}
Exercise 2
2
) Create a scene to represent the world specified in Exercise 1. Then,
integrate the HSP Planner in the project and implement the actions
of the NPC John to execute the generated plan.
strong weapon (magic bow)
weak weapon (sword)
inside
John
weak troll
Store
chest key
River
chest
strong dragon
Castle
Town
Forest
Cave
Automated Planning in Games
Games that are know for using planning algorithms:
STRIPS-based action planning:
•
–
–
HTN-based action planning:

Automated Planning in Games
•
There are many possible applications for automated planning
in games:
–
–
–
–
–
Planning NPC actions;
Strategy planning;
Design, test, and evaluate puzzles;
Quest generation;
Interactive storytelling;
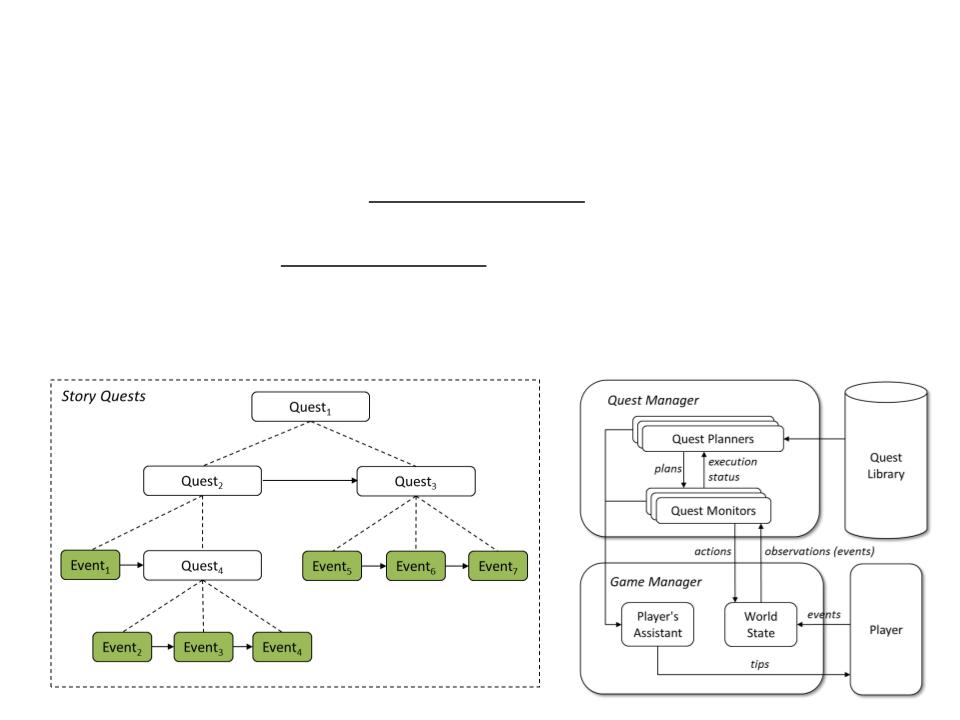
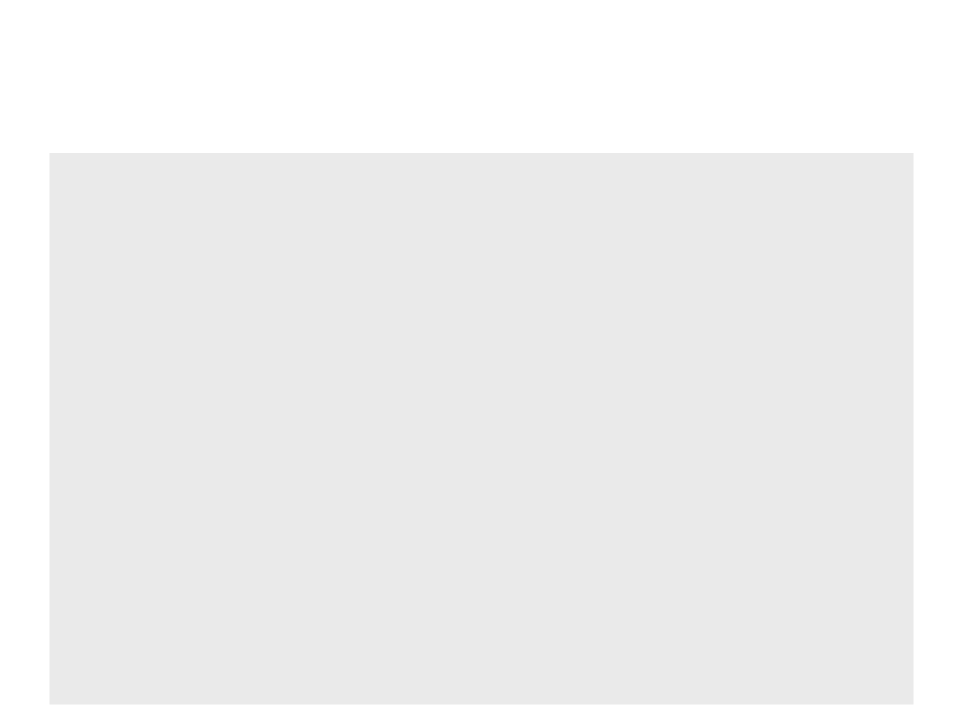
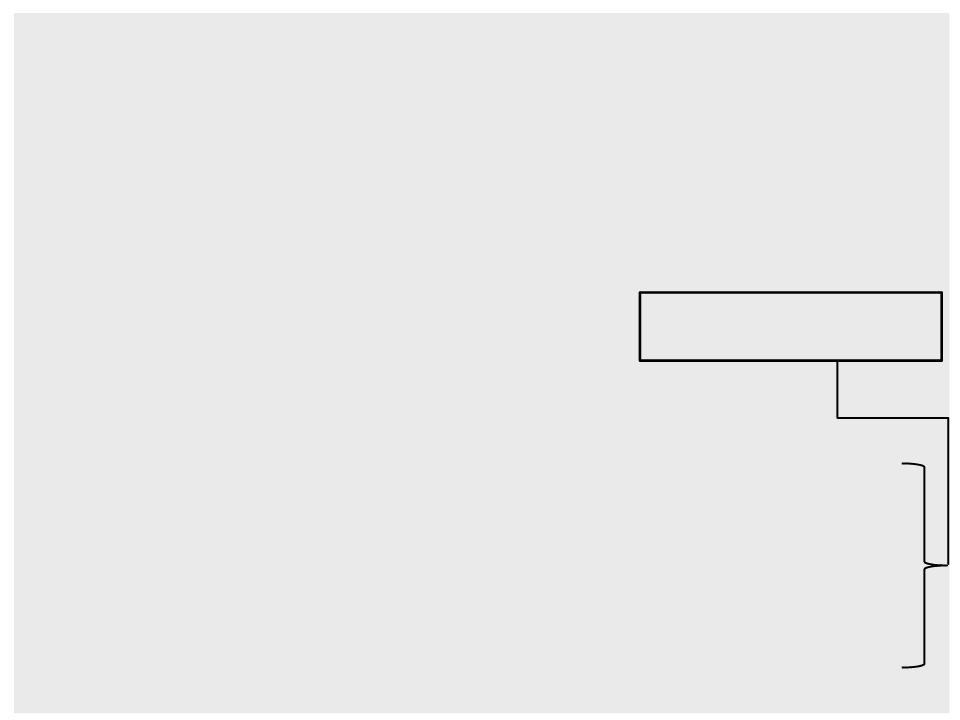
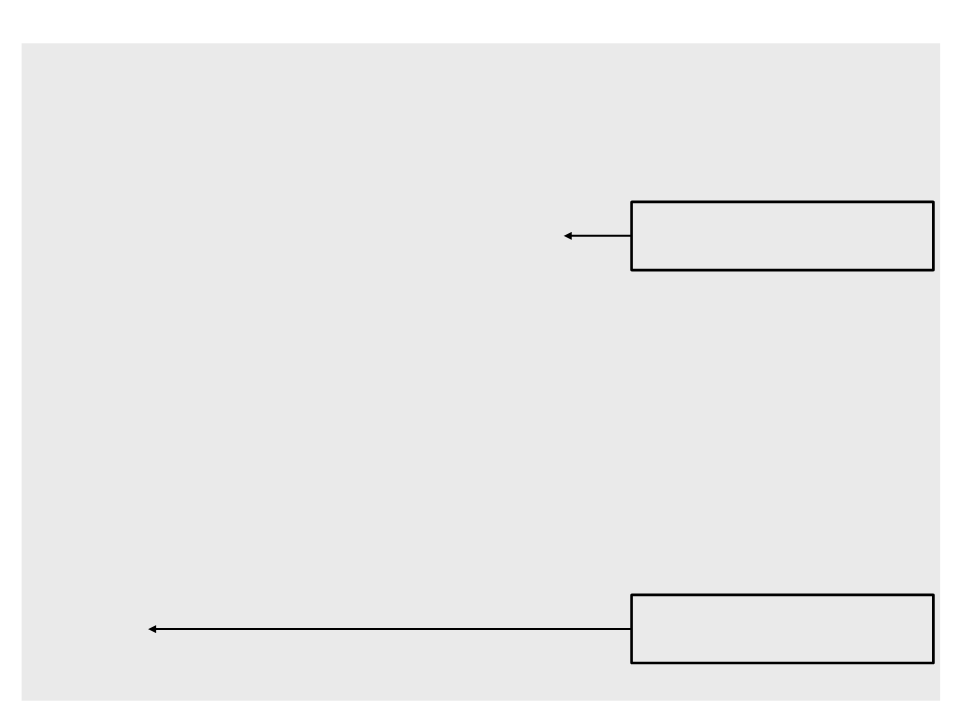
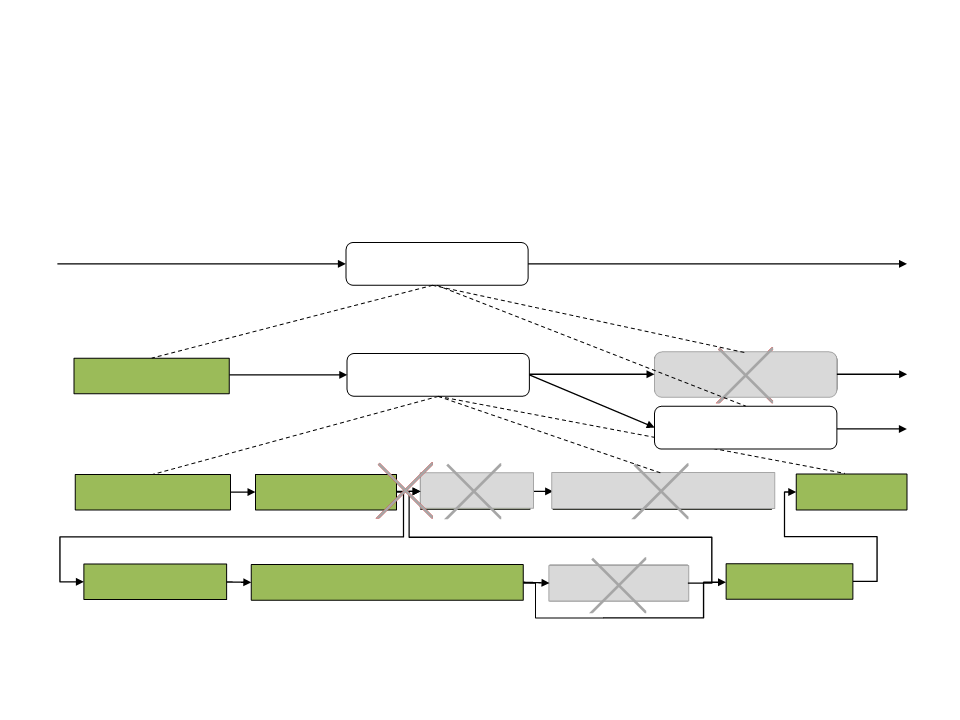
Hierarchical Generation of Dynamic
and Nondeterministic Quests
A combination of several story-related quests can be used to create
complex narratives. The structure of the game's narrative can be
represented as a hierarchy of quests.
•
–
Lima, E.S. Feijó, B., and Furtado, A.L. Hierarchical Generation of Dynamic and
Nondeterministic Quests in Games. International Conference on Advances in Computer
Entertainment Technology (ACE 2014).
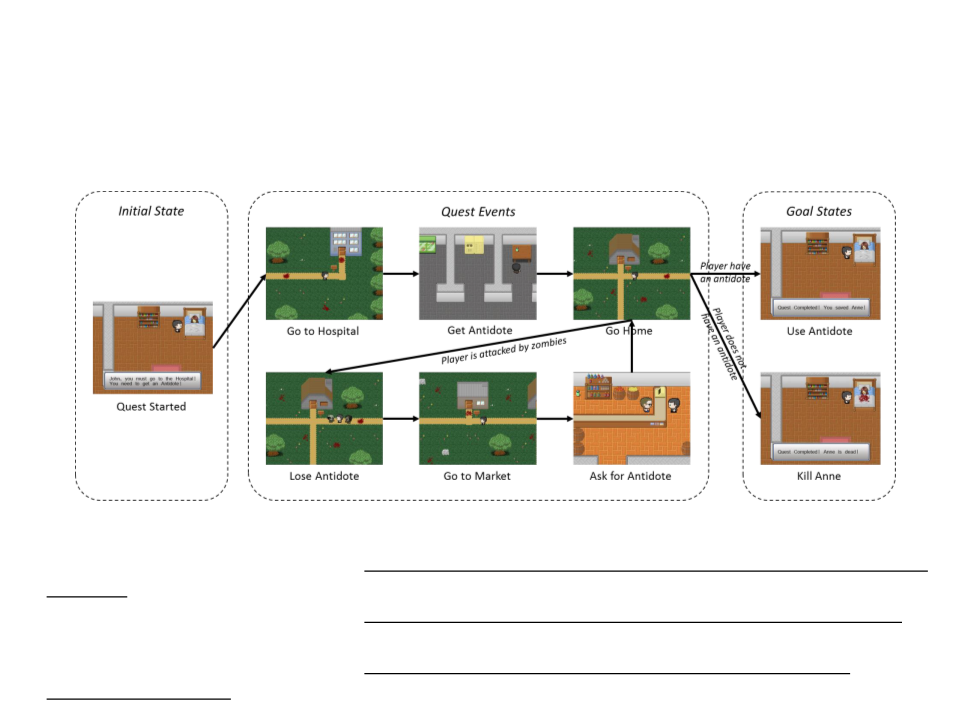
Hierarchical Generation of Dynamic
and Nondeterministic Quests
Save family
Take home
Save wife
PPrrootteecctt hhoouussee
Escape
Go to hospital
Go to market
Get antidote
GGoo hhoommee
GGiivvee aannttiiddoottee ttoo wwiiffee
Kill wife
¬
has(player,antidote)
Ask old man for an antidote
GGeett aannttiiddoote
Go home
¬has(player,antidote)
Hierarchical Generation of Dynamic
and Nondeterministic Quests
Publications:
•
•
•
Lima, E.S. Feijó, B., and Furtado, A.L. Hierarchical Generation of Dynamic and Nondeterministic Quests
in Games. International Conference on Advances in Computer Entertainment Technology, 2014.
Lima, E.S. Feijó, B., and Furtado, A.L. Player Behavior Modeling for Interactive Storytelling in Games. XV
Brazilian Symposium on Computer Games and Digital Entertainment, 2016 [Best Paper Award].
Lima, E.S. Feijó, B., and Furtado, A.L. Player Behavior and Personality Modeling for Interactive
Storytelling in Games. Entertainment Computing, Volume 28, December 2018, p. 32-48, 2018.

Further Reading
•
•
Buckland, M. (2004). Programming Game AI by Example. Jones & Bartlett
Learning. ISBN: 978-1-55622-078-4.
–
Chapter 9: Goal-Driven Agent Behavior
Millington, I., Funge, J. (2009). Artificial Intelligence for Games (2nd ed.).
CRC Press. ISBN: 978-0123747310.
–
Chapter 5.7: Goal-Oriented Behavior
Further Reading
•
•
•
•
Three States and a Plan: The A.I. of F.E.A.R:
http://alumni.media.mit.edu/~jorkin/gdc2006_orkin_jeff_fear.pdf
HTN Planning in Transformers: Fall of Cybertron:
https://aiandgames.com/cybertron-intel/
Planning in Games: An Overview and Lessons Learned:
Goal-Oriented Action Planning (GOAP):